
小车自动避障及路径规划.doc

胜利****实阿

1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

小车自动避障及路径规划.doc
第3章系统总体结构及工作原理该系统主要以超声波测距为基本测距原理,并在相应的硬件和软件的支持下,达到机器人避障的效果。机器人总体硬件设计传感器的分布要求为了全方位检测障物的分布状况,并及时为机器人系统提供全面的数据,可将所需的八个传感器均匀排列在机器人周围,相邻每对传感器互成45度角。为了避免相互干扰,八个传感器以程序运行周期为周期,进行循环测距。传感器排列示意图如下:d0d1d2d3d4d5d6d7图传感器分布图避障系统总体电路框架图设计红外传感器A/D转换单片机左侧电机超声波信号右侧电机LED显示LE
小车自动避障及路径规划.doc
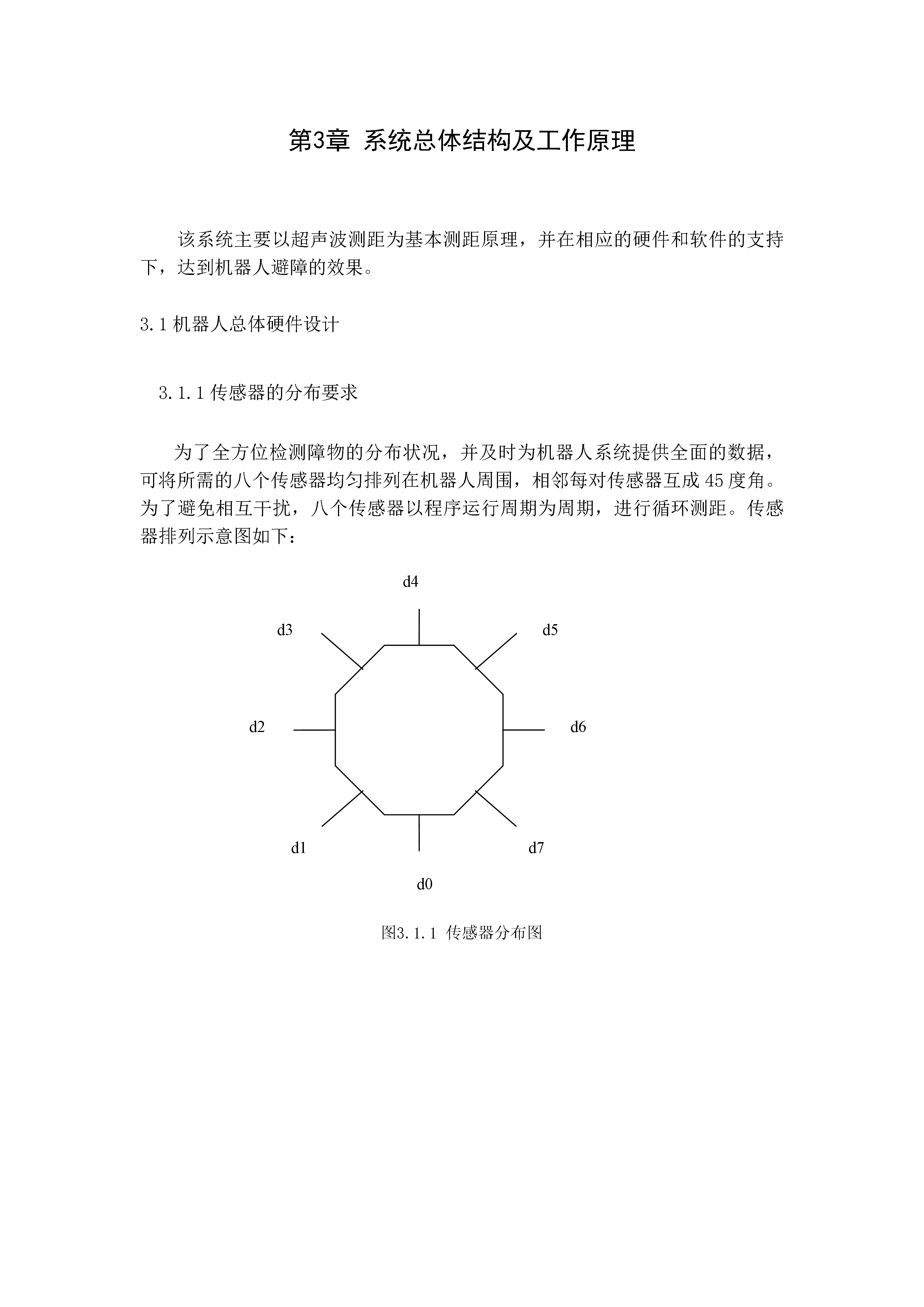
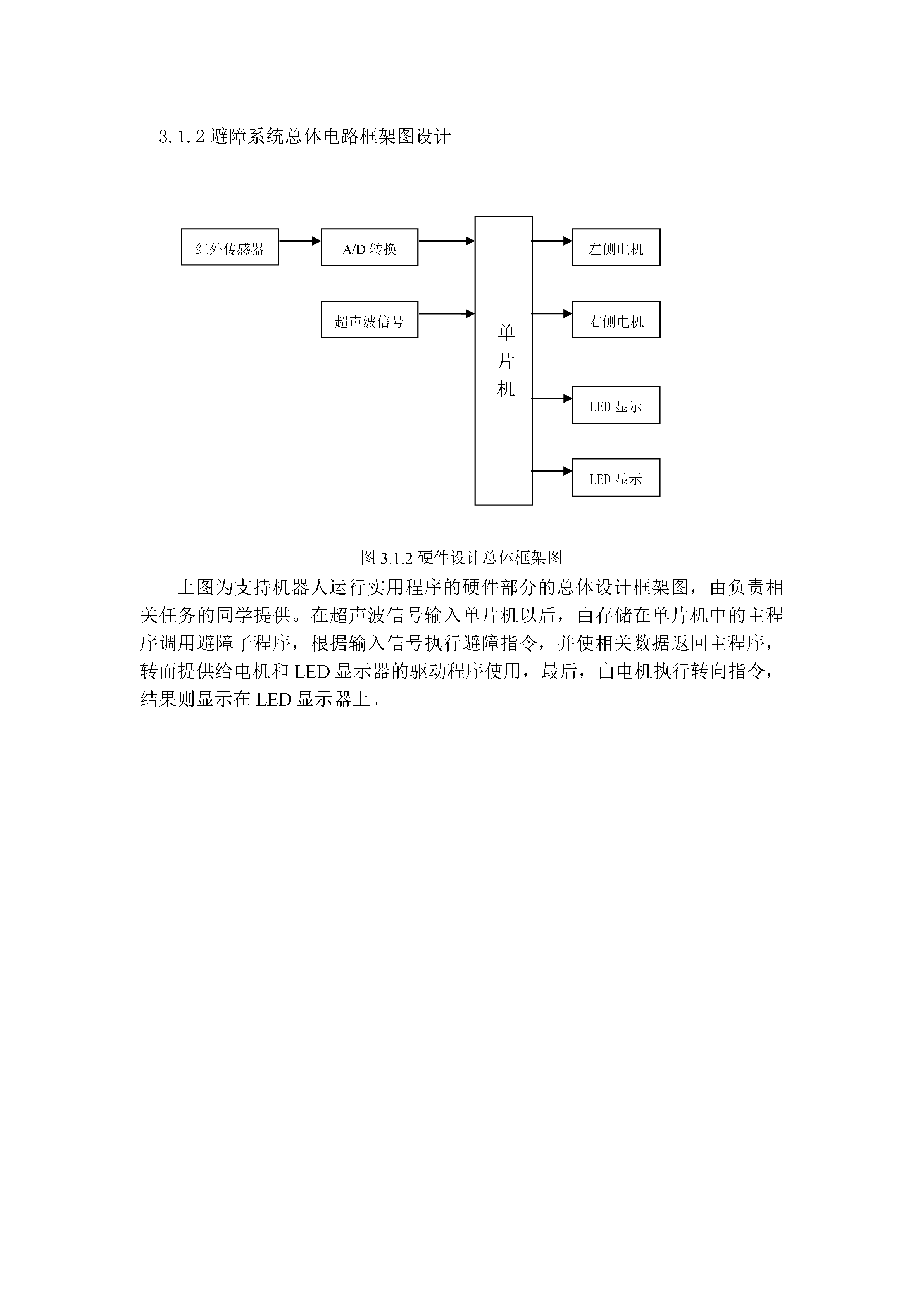
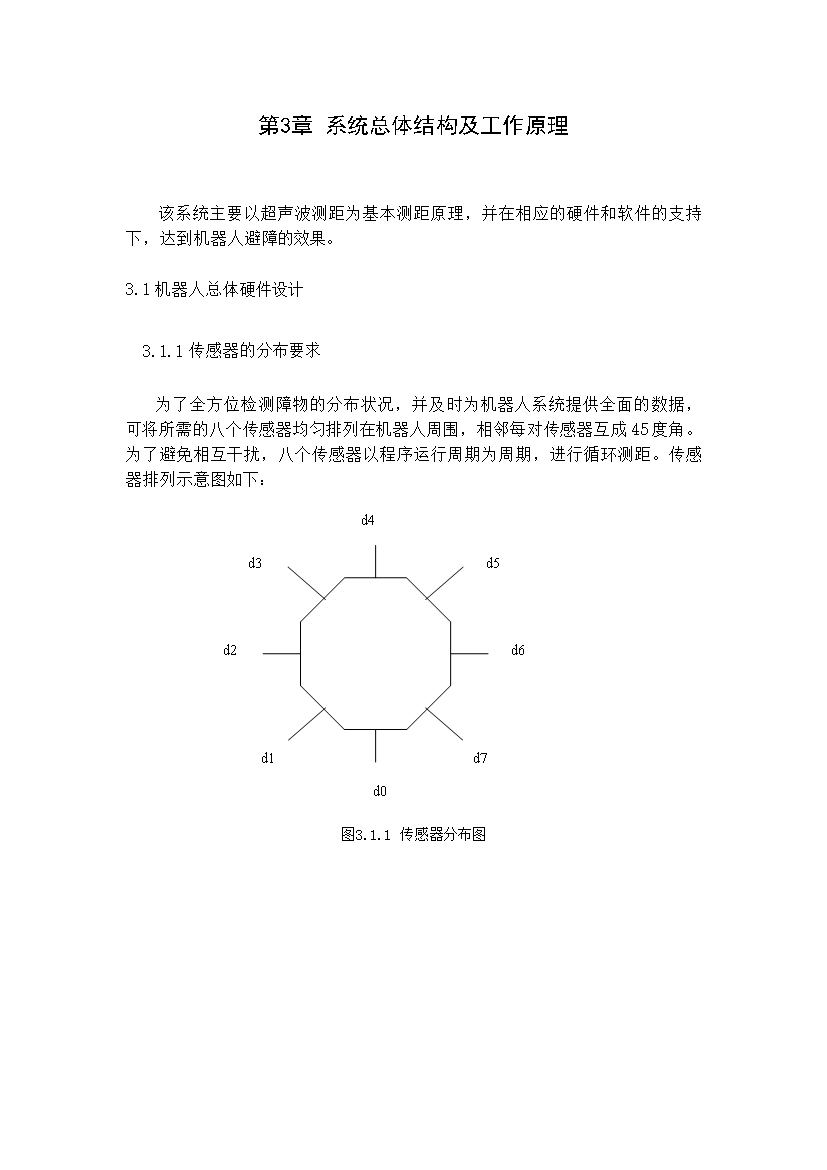
第3章系统总体结构及工作原理该系统主要以超声波测距为基本测距原理,并在相应的硬件和软件的支持下,达到机器人避障的效果。3.1机器人总体硬件设计3.1.1传感器的分布要求为了全方位检测障物的分布状况,并及时为机器人系统提供全面的数据,可将所需的八个传感器均匀排列在机器人周围,相邻每对传感器互成45度角。为了避免相互干扰,八个传感器以程序运行周期为周期,进行循环测距。传感器排列示意图如下:d0d1d2d3d4d5d6d7图3.1.1传感器分布图3.1.2避障系统总体电路框架图设计红外传感器A/D转换单片机左侧

小车自动避障及路径规划.doc
第3章系统总体结构及工作原理该系统主要以超声波测距为基本测距原理,并在相应的硬件和软件的支持下,达到机器人避障的效果。3.1机器人总体硬件设计3.1.1传感器的分布要求为了全方位检测障物的分布状况,并及时为机器人系统提供全面的数据,可将所需的八个传感器均匀排列在机器人周围,相邻每对传感器互成45度角。为了避免相互干扰,八个传感器以程序运行周期为周期,进行循环测距。传感器排列示意图如下:d0d1d2d3d4d5d6d7图3.1.1传感器分布图3.1.2避障系统总体电路框架图设计红外传感器A/D转换单片机左侧

小车自动避障及路径规划样本.doc
第3章系统总体构造及工作原理该系统重要以超声波测距为基本测距原理,并在相应硬件和软件支持下,达到机器人避障效果。3.1机器人总体硬件设计3.1.1传感器分布规定为了全方位检测障物分布状况,并及时为机器人系统提供全面数据,可将所需八个传感器均匀排列在机器人周边,相邻每对传感器互成45度角。为了避免互相干扰,八个传感器以程序运营周期为周期,进行循环测距。传感器排列示意图如下:d0d1d2d3d4d5d6d7图3.1.1传感器分布图3.1.2避障系统总体电路框架图设计红外传感器A/D转换单片机左侧电机超声波信号

小车自动避障及路径规划样本.doc
资料内容仅供您学习参考,如有不当或者侵权,请联系改正或者删除。第3章系统总体结构及工作原理该系统主要以超声波测距为基本测距原理,并在相应的硬件和软件的支持下,达到机器人避障的效果。3.1机器人总体硬件设计3.1.1传感器的分布要求为了全方位检测障物的分布状况,并及时为机器人系统提供全面的数据,可将所需的八个传感器均匀排列在机器人周围,相邻每对传感器互成45度角。为了避免相互干扰,八个传感器以程序运行周期为周期,进行循环测距。传感器排列示意图如下:d0d1d2d3d4d5d6d7图3.1.1传感器分布图3.