
卸瓶垛机机械手的抓取改造.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

卸瓶垛机机械手的抓取改造.docx
卸瓶垛机机械手的抓取改造随着现代化社会不断发展,卸瓶垛机逐渐被广泛应用于酒水饮料、食品、制药等行业的生产流程中,使得生产效率和品质得到了显著提升。与此同时,升级并改进卸瓶垛机的机械手也成为了一种趋势性需求。本文将探讨机器人机械臂的抓取改造技术,以提高卸瓶垛机的生产效率和品质,减少运行成本,促进企业向智能化和自动化方向发展。一、卸瓶垛机机械手抓取方式的现状在传统的卸瓶垛机中,机械手的抓取方式通常是使用气动爪或机械臂,通过关闭或打开气路来控制抓取和释放瓶子。虽然这种方式可以实现基本的功能,并且运行稳定,但在一

卸瓶垛机.pdf
一种卸瓶垛机,包括机架、瓶垛提升机构、瓶子平移机构和隔板取放机构;机架包括底座、左立柱和右立柱,左立柱上设有左竖直导轨,右立柱上设有右竖直导轨;瓶垛提升机构包括提升叉和提升叉升降驱动机构,提升叉左端设有左升降导引滚轮安装板,左升降导引滚轮安装板上安装有至少三个与左竖直导轨配合的左升降导引滚轮;提升叉右端设有右升降导引滚轮安装板,右升降导引滚轮安装板上安装有至少三个与右竖直导轨配合的右升降导引滚轮;瓶子平移机构设于提升叉上方;隔板取放机构包括支撑座、摆动臂、摆动驱动电机、摆动传动减速器、吸盘组件和吸盘组件升

基于ASI现场总线模块在卸瓶垛机的应用.docx
基于ASI现场总线模块在卸瓶垛机的应用基于ASI现场总线模块在卸瓶垛机的应用摘要随着现代工业自动化的快速发展,各种应用于生产线的自动化设备也得到了广泛的应用。本文以卸瓶垛机为例,探讨了ASI现场总线模块在卸瓶垛机中的应用。首先,介绍了ASI现场总线模块的特点和优势,然后分析了卸瓶垛机的工作原理以及其自动化控制系统的需求。接下来,详细阐述了ASI现场总线模块在卸瓶垛机中的应用,包括数据传输、仿真与监控、故障诊断等方面。最后,对ASI现场总线模块在卸瓶垛机中的应用进行了总结,并展望了未来的发展方向。关键词:A

一种卸垛机.pdf
本发明公开了一种卸垛机,包括:机架、悬挂在机架上的行走机构、与行走机构固定连接的升降机构、旋转连接在升降机构下端的抓取机构,该装置升降机构采用链轮缓冲升降,抓取机构的抓爪设有同步装置。本发明一种卸垛机能够在标砖打包运输过程中实现全机械化卸垛,免除了人工搬运操作,节约了人力资源,降低了生产成本,且操作便捷,工作可靠,提高了生产效率。
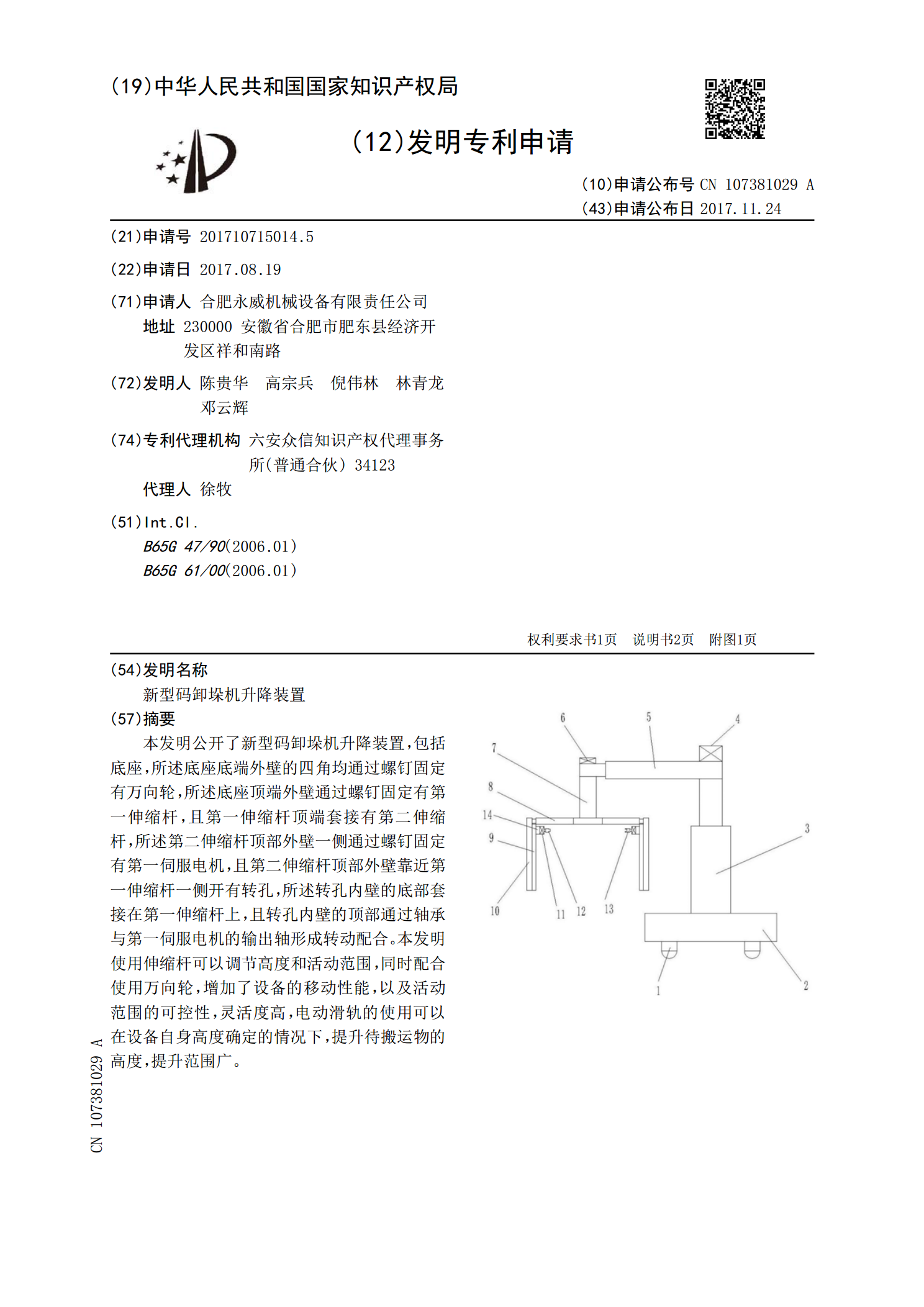
新型码卸垛机升降装置.pdf
本发明公开了新型码卸垛机升降装置,包括底座,所述底座底端外壁的四角均通过螺钉固定有万向轮,所述底座顶端外壁通过螺钉固定有第一伸缩杆,且第一伸缩杆顶端套接有第二伸缩杆,所述第二伸缩杆顶部外壁一侧通过螺钉固定有第一伺服电机,且第二伸缩杆顶部外壁靠近第一伸缩杆一侧开有转孔,所述转孔内壁的底部套接在第一伸缩杆上,且转孔内壁的顶部通过轴承与第一伺服电机的输出轴形成转动配合。本发明使用伸缩杆可以调节高度和活动范围,同时配合使用万向轮,增加了设备的移动性能,以及活动范围的可控性,灵活度高,电动滑轨的使用可以在设备自身高