
动态环境中的无人机路径规划方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

动态环境中的无人机路径规划方法.docx
动态环境中的无人机路径规划方法无人机路径规划是指在动态环境下,通过设计合理的算法,使得无人机能够安全、高效地穿越障碍物和避免碰撞,完成预定任务的过程。路径规划是无人机自主飞行的关键技术之一,它直接影响着无人机的飞行安全性、效率和可靠性。针对动态环境中无人机的路径规划问题,本文将介绍常见的方法和算法,包括传统方法和深度学习方法,并对它们进行评估和比较。一、传统方法1.A*算法A*算法是一种常用的搜索算法,它适用于在已知环境中求解最短路径问题。在无人机路径规划中,A*算法将动态环境建模为一个网格图,通过计算每

动态环境中的无人机路径规划方法.docx
动态环境中的无人机路径规划方法无人机路径规划方法在动态环境中的研究主要目的是为了提高无人机的飞行安全性和效率。动态环境中的路径规划与传统静态环境中的规划相比更具挑战性,因为动态环境中各类不确定性因素增加,例如飞行障碍物的出现和突发事件,这些都会对无人机的路径规划和飞行控制产生较大的影响。针对这个问题,研究人员提出了一系列的路径规划方法,包括基于传感器和机器视觉的感知、模型预测控制和强化学习等方法。首先,基于传感器和机器视觉的感知方法是无人机路径规划的基础。传感器和摄像头可以用来感知周围环境,并检测飞行障碍

无人机群协同目标搜索中的动态路径规划方法及系统.pdf
本发明公开了一种无人机群协同目标搜索中的动态路径规划方法及系统,包括:初始化搜索任务及优化算法相关参量;将搜索区域和路径进行离散化处理,基于滚动时域控制策略设计当前时刻的目标函数集合;使用麻雀算法优化当前时刻的各单目标函数,得到最优解/最劣解;基于TOPSIS法构造综合效能函数,进行目标函数集合的组合优化;以当前时刻的最优解作为下一时刻的搜索路径点,循环迭代优化直至达到终止条件,规划出无人机完整的搜索路径。本发明的无人机群协同目标搜索中的动态路径规划方法在求解质量上有着明显的优势,能够在动态环境中为无人机

无人机在未知环境中基于学习的路径规划方法.docx
无人机在未知环境中基于学习的路径规划方法摘要:无人机的智能路径规划是无人机应用领域研究的热点之一。在未知环境中进行路径规划是无人机能够自主、灵活地完成任务的关键。本文提出一种基于学习的无人机路径规划方法,该方法结合了深度学习和强化学习的技术,在未知环境中能够快速且有效地规划无人机的路径。实验结果表明,该方法可以在不断探索环境的情况下学习到最优的路径规划策略,具有很高的准确性和可靠性。1.引言无人机的应用领域越来越广泛,如物流配送、农业植保和环境监测等。在这些领域,路径规划是无人机能够自主执行任务的关键。在
动态路径规划的方法及装置.pdf
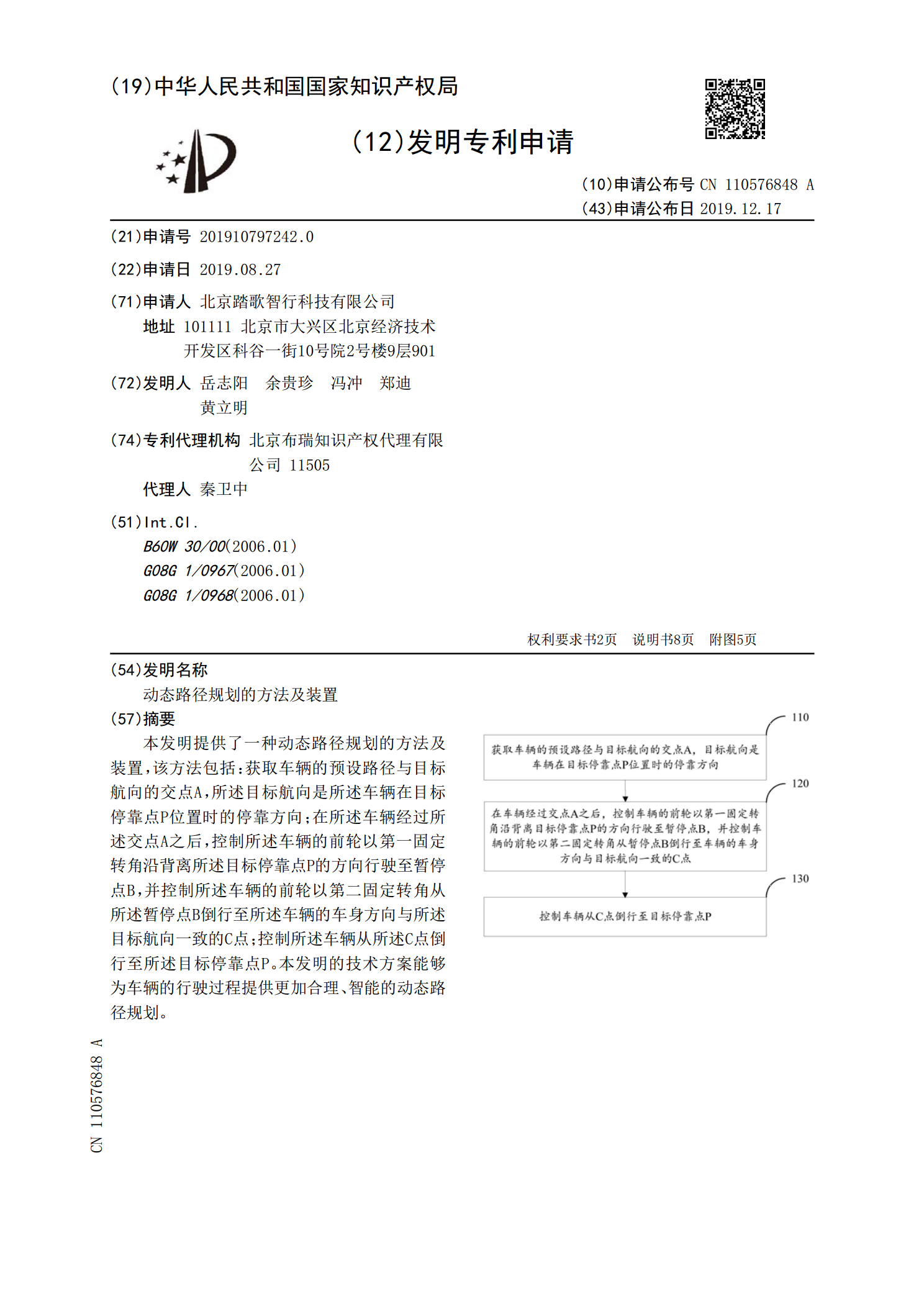
本发明提供了一种动态路径规划的方法及装置,该方法包括:获取车辆的预设路径与目标航向的交点A,所述目标航向是所述车辆在目标停靠点P位置时的停靠方向;在所述车辆经过所述交点A之后,控制所述车辆的前轮以第一固定转角沿背离所述目标停靠点P的方向行驶至暂停点B,并控制所述车辆的前轮以第二固定转角从所述暂停点B倒行至所述车辆的车身方向与所述目标航向一致的C点;控制所述车辆从所述C点倒行至所述目标停靠点P。本发明的技术方案能够为车辆的行驶过程提供更加合理、智能的动态路径规划。