
飞机防滑刹车系统控制器的设计及仿真研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

飞机防滑刹车系统控制器的设计及仿真研究.docx
飞机防滑刹车系统控制器的设计及仿真研究一、背景随着航空运输业的发展,飞机的安全性越来越受到重视,而防滑刹车系统是确保飞机在起飞和着陆过程中安全的重要装备。防滑刹车系统的控制器是其关键部分,其设计和仿真研究对系统的性能和安全性都至关重要。二、防滑刹车系统控制器设计防滑刹车系统控制器可以通过PID控制算法来控制刹车力的大小。PID控制算法包括比例项、积分项和微分项,其中比例项控制当前误差大小,积分项和微分项控制误差变化的速度和方向,从而实现对系统的稳定性和精确性的控制。针对防滑刹车系统的控制需求,可以设置目标

飞机防滑刹车系统控制器的设计及仿真研究的中期报告.docx
飞机防滑刹车系统控制器的设计及仿真研究的中期报告一、选题背景及研究意义随着现代民用航空事业的飞速发展,飞机的性能不断提高,而飞机的安全性也成为人们关注的重点之一。飞机着陆时的刹车性能直接影响到飞机的安全性,特别是在潮湿或结冰的地面,更容易出现刹车距离过长、侧滑、打滑等现象。为了提高飞机的刹车性能和安全性,防滑刹车系统成为现代飞机上必备的装置之一。防滑刹车系统通过控制飞机轮胎的滑动程度和刹车力量,实现在任何路面条件下的安全刹车。防滑刹车系统控制器作为防滑刹车系统的核心部件,主要负责控制刹车压力和防止飞机轮胎

飞机防滑刹车系统的建模与仿真研究的综述报告.docx
飞机防滑刹车系统的建模与仿真研究的综述报告本文将综述飞机防滑刹车系统的建模与仿真研究。飞机防滑刹车系统是飞机上非常重要的系统之一,其主要作用是确保飞机在着陆、刹车等操作过程中可以保证安全地停止。为了实现这个目标,需要对飞机防滑刹车系统进行建模和仿真研究。一、飞机防滑刹车系统简介飞机防滑刹车系统是指控制飞机着陆时的刹车效果以及其它地面操作时的控制系统。在飞机着陆时,随着飞机的接触地面,刹车系统被激活。系统中的防滑装置会通过传感器和电子控制系统监测轮胎转速,并控制着陆速度和轮胎磨损。如果轮胎旋转过快,防滑装置
飞机刹车防滑控制方法及飞机刹车系统.pdf
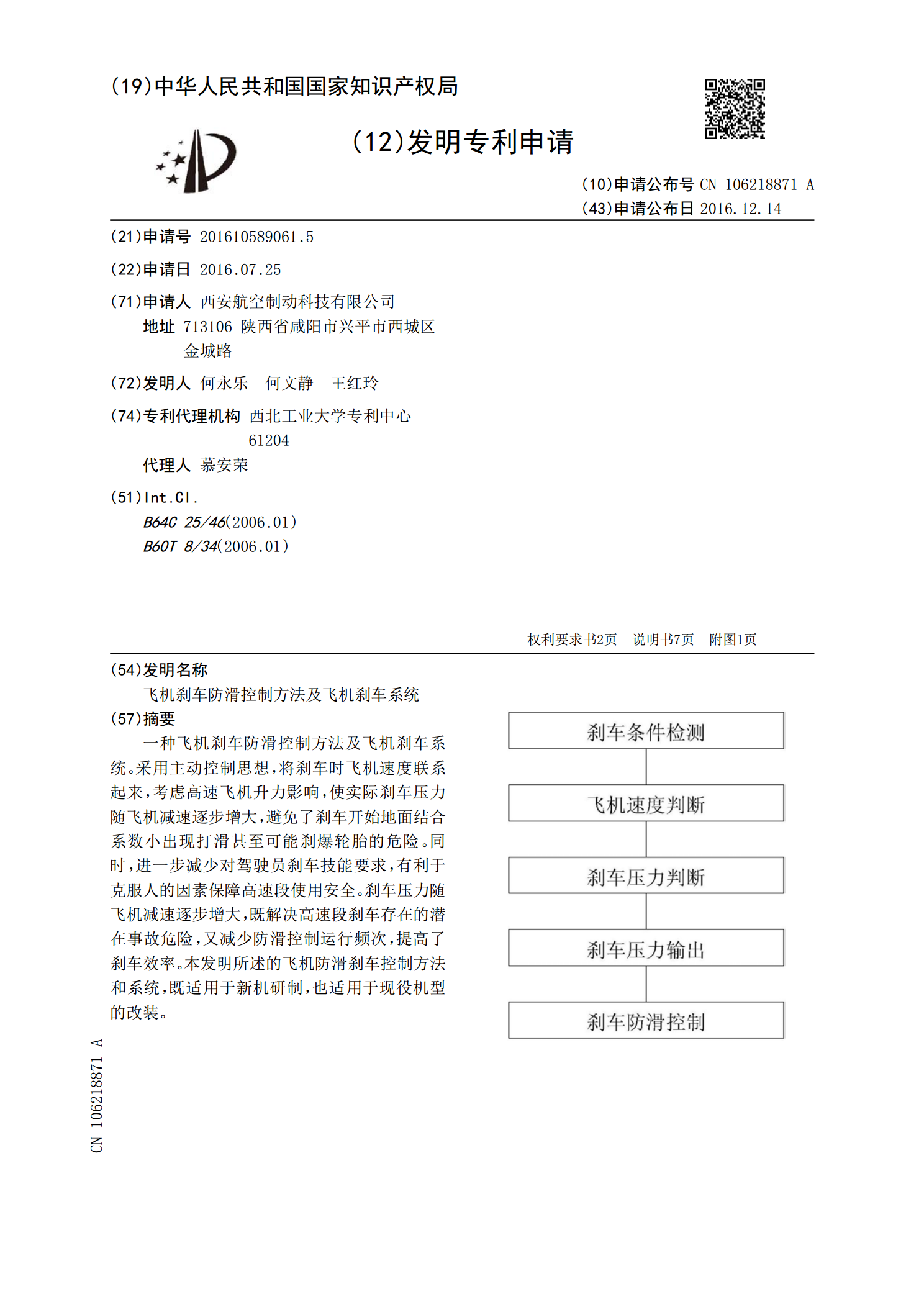
一种飞机刹车防滑控制方法及飞机刹车系统。采用主动控制思想,将刹车时飞机速度联系起来,考虑高速飞机升力影响,使实际刹车压力随飞机减速逐步增大,避免了刹车开始地面结合系数小出现打滑甚至可能刹爆轮胎的危险。同时,进一步减少对驾驶员刹车技能要求,有利于克服人的因素保障高速段使用安全。刹车压力随飞机减速逐步增大,既解决高速段刹车存在的潜在事故危险,又减少防滑控制运行频次,提高了刹车效率。本发明所述的飞机防滑刹车控制方法和系统,既适用于新机研制,也适用于现役机型的改装。

飞机防滑刹车系统试验研究.docx
飞机防滑刹车系统试验研究飞机防滑刹车系统试验研究摘要:飞机的防滑刹车系统是保证飞机在着陆时安全停止的重要装备之一。本文通过对飞机防滑刹车系统的试验研究,探讨了该系统对飞机着陆性能的影响,以及其在不同环境条件下的可靠性。试验结果表明,飞机防滑刹车系统有效降低了飞机着陆时的制动距离,提高了飞机的着陆安全性。同时,该系统在各种环境条件下都表现出稳定可靠的性能,具有较高的精准度和可操作性。本研究为飞机防滑刹车系统的进一步优化提供了理论依据。关键词:飞机;防滑刹车系统;试验研究;性能;可靠性第一部分:引言飞机在着陆