
轴承套圈双轴数控机床装夹机械臂的机构分析及优化.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轴承套圈双轴数控机床装夹机械臂的机构分析及优化.docx
轴承套圈双轴数控机床装夹机械臂的机构分析及优化一、引言机械臂的发展已经得到了广泛的应用,其重要性无需多言。而对于数控机床来说,机械臂的应用尤为重要。本文将介绍轴承套圈双轴数控机床装夹机械臂的机构分析及优化,以提高数控机床的装夹精度和稳定性。二、机械臂的机构分析轴承套圈双轴数控机床装夹机械臂主要由机械臂基座、关节和机械臂末端等几部分组成。其中,关节部分包括转动关节、伸缩关节和旋转关节等多个关节。机械臂末端通过夹具来夹紧工件,完成工件的移动和定位。在机构分析的过程中,需要考虑机械结构的刚性和稳定性。结构刚性是

轴承套圈双轴数控机床装夹机械臂的机构分析及优化的任务书.docx
轴承套圈双轴数控机床装夹机械臂的机构分析及优化的任务书任务书一、任务背景与意义随着制造业不断发展和技术的进步,数控机床已成为现代制造业生产过程中不可或缺的重要设备。采用数控机床进行加工制造,不仅提高了生产效率和生产质量,而且还降低了人工成本和设备使用成本,因此深受制造业的青睐。而机械臂是一种多关节、可编程、协作性强的机械装置,能够以高精度和高速度进行运动、搬运或操作。机械臂在现代制造业中也应用非常广泛,特别是在数控机床的装夹和夹具领域,机械臂在夹持工件和调整位置方面发挥了重要的作用。但是,在机械臂装夹数控

5R装夹机械臂几何参数优化设计.docx
5R装夹机械臂几何参数优化设计Title:GeometricParameterOptimizationDesignof5RClampingRobotArmAbstract:Theobjectiveofthispaperistooptimizethegeometricparametersofa5Rclampingrobotarm.Thedesignoftherobotarmplaysacriticalroleinitsperformanceandefficiency.Byselectingappropria

5R装夹机械臂几何参数优化设计.docx
5R装夹机械臂几何参数优化设计5R装夹机械臂是一种常见的工业机械装置,被广泛应用于各种精密加工任务中。机械臂的几何参数对其性能和精度有着至关重要的影响。因此,对5R装夹机械臂的几何参数优化设计进行研究是有必要的。首先,我们需要了解5R装夹机械臂的定义和构造。5R机械臂指的是由5个可旋转的关节连接而成的机械臂,能够在三维空间内进行精细的运动控制。其中,R代表旋转关节。接下来,我们需要考虑机械臂的运动学性能。机械臂的运动学性能包括速度、加速度和运动范围。对于5R机械臂来说,其运动学性能受到几何参数的制约。其中
控制轴转向的双横臂机构.pdf
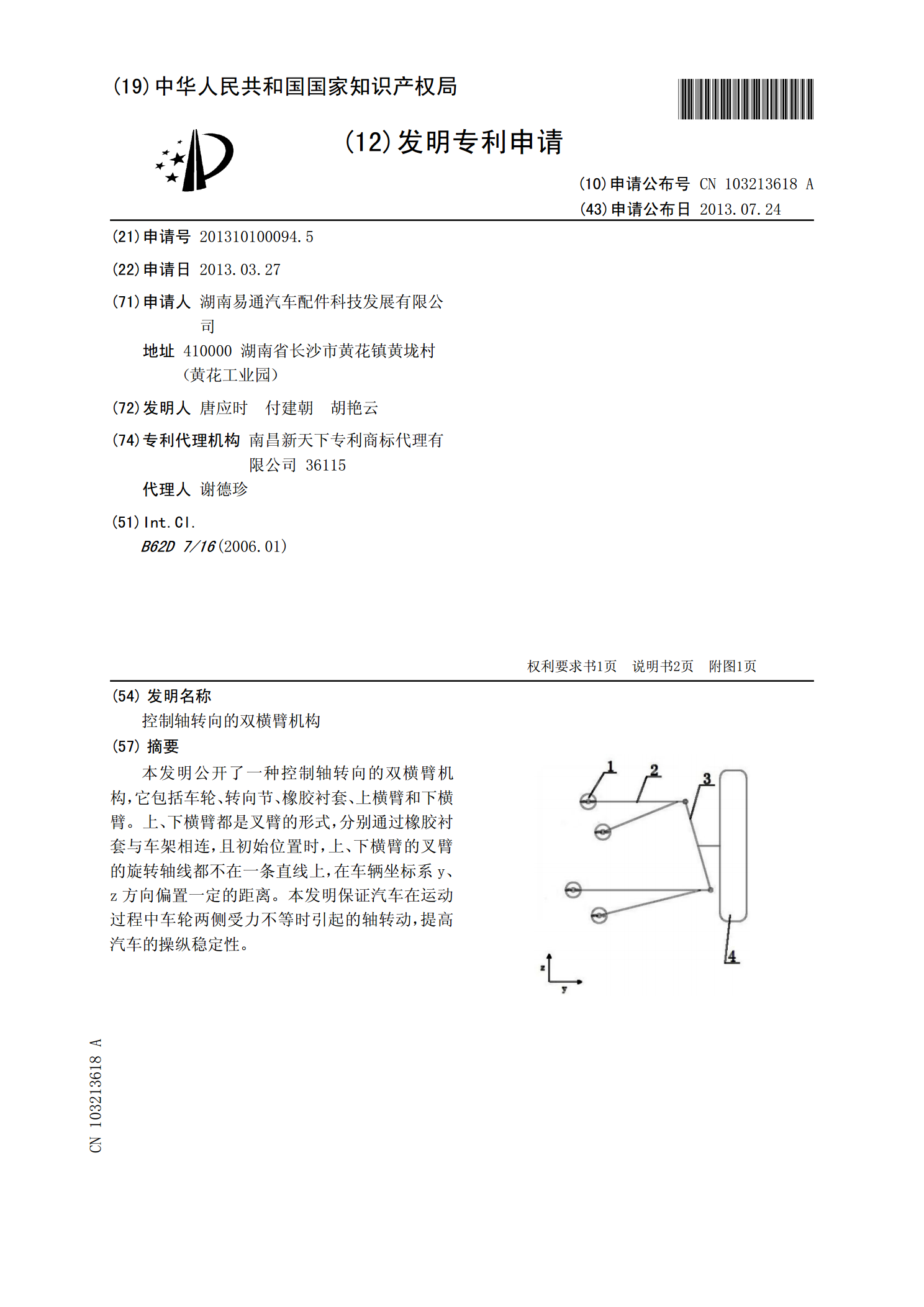
本发明公开了一种控制轴转向的双横臂机构,它包括车轮、转向节、橡胶衬套、上横臂和下横臂。上、下横臂都是叉臂的形式,分别通过橡胶衬套与车架相连,且初始位置时,上、下横臂的叉臂的旋转轴线都不在一条直线上,在车辆坐标系y、z方向偏置一定的距离。本发明保证汽车在运动过程中车轮两侧受力不等时引起的轴转动,提高汽车的操纵稳定性。