
永磁同步电机无速度传感器控制的转子初始位置检测.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

永磁同步电机无速度传感器控制的转子初始位置检测.docx
永磁同步电机无速度传感器控制的转子初始位置检测引言永磁同步电机(PermanentMagnetSynchronousMotor,PMSM)因其高效率、高功率密度和响应速度快等优点,已经广泛应用于工业和家用电器中。然而,永磁同步电机的转速和位置测量通常需要使用传感器,例如增量编码器和霍尔效应传感器。然而,传感器有较高的价格、寿命和可靠性问题。因此,研究无速度传感器控制的转子初始位置检测技术是提高永磁同步电机性能和降低成本的重要途径。无速度传感器控制的转子初始位置检测技术无速度传感器控制的转子初始位置检测技术

永磁同步电机无速度传感器控制的转子初始位置检测的中期报告.docx
永磁同步电机无速度传感器控制的转子初始位置检测的中期报告一、研究背景永磁同步电机(PMSM)广泛应用于各种工业自动化系统、轨道交通系统,以及电动汽车、电动自行车等新能源领域。传统的PMSM驱动系统需要使用速度传感器来获得转速和转子位置信息,而速度传感器容易受到机械故障和温度变化而产生误差,影响系统的性能和稳定性。因此,无速度传感器的PMSM驱动系统逐渐被广泛关注和研究。无速度传感器控制的PMSM驱动系统需要通过其他方式来获得转子位置信息,如估算,而估算误差会引起系统振荡和失速等问题。因此,准确的转子位置检

永磁同步电机转子初始位置检测方法.docx
永磁同步电机转子初始位置检测方法永磁同步电机转子初始位置检测方法摘要:永磁同步电机作为一种高效、高性能的电动机,广泛应用于各个领域。而在永磁同步电机的控制过程中,转子初始位置的准确检测对于电机性能的表现至关重要。本文将介绍几种常见的永磁同步电机转子初始位置检测方法,并对其优缺点进行评估和比较,为电机控制策略的选择提供参考依据。1.引言永磁同步电机由于具有高效、高性能的特点,在电动汽车、工业自动化等领域得到了广泛应用。在控制永磁同步电机过程中,准确检测转子初始位置是实现高效控制的关键。本文将介绍几种常见的转
永磁同步电机转子位置检测及初始位置标定方法.pdf
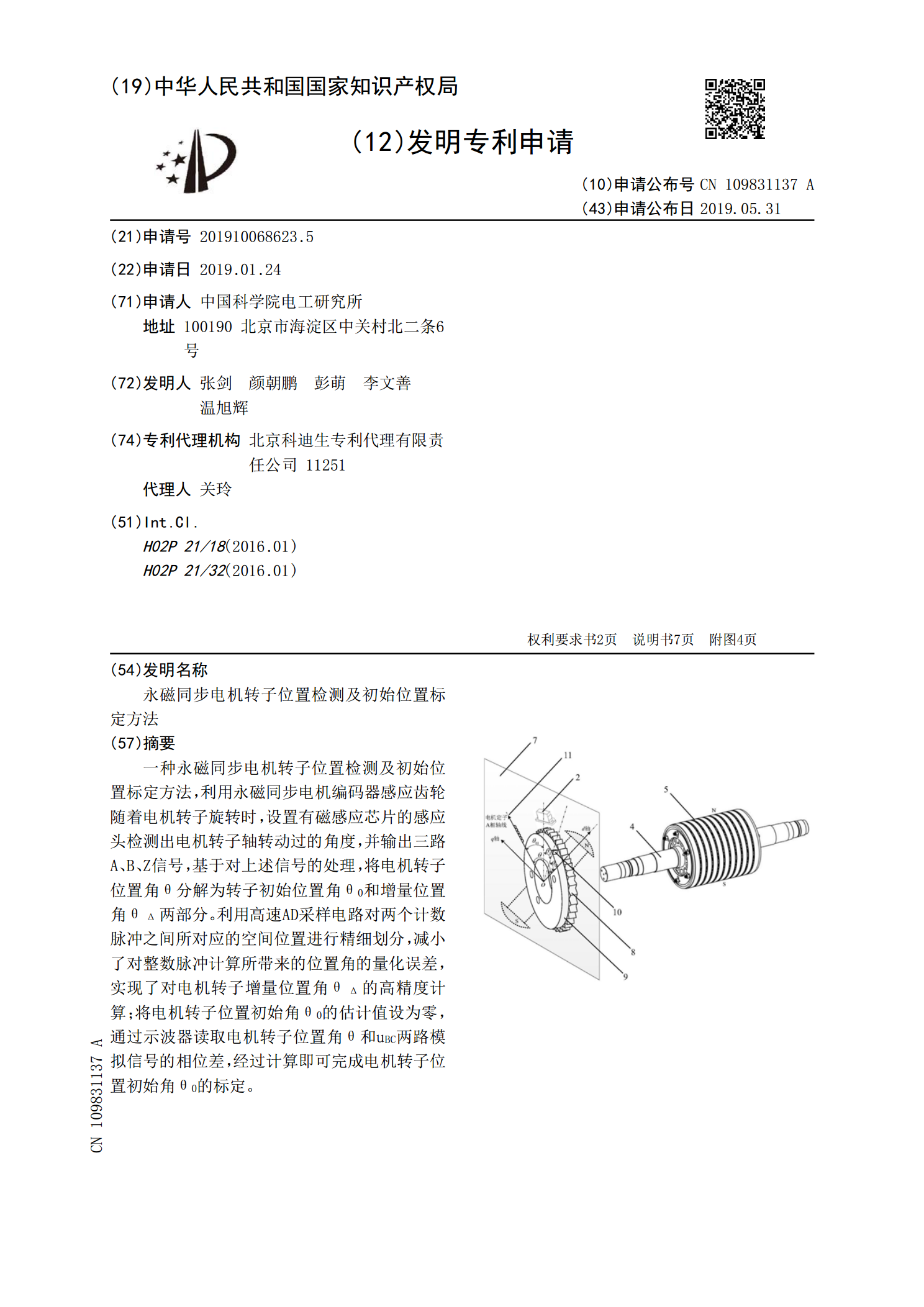
一种永磁同步电机转子位置检测及初始位置标定方法,利用永磁同步电机编码器感应齿轮随着电机转子旋转时,设置有磁感应芯片的感应头检测出电机转子轴转动过的角度,并输出三路A、B、Z信号,基于对上述信号的处理,将电机转子位置角θ分解为转子初始位置角θ

永磁同步电机转子初始位置角在线检测方法.pptx
永磁同步电机转子初始位置角在线检测方法目录添加目录项标题永磁同步电机转子初始位置角在线检测方法概述检测方法的重要性检测方法的原理检测方法的分类检测方法的优缺点永磁同步电机转子初始位置角在线检测方法的关键技术信号采集技术信号处理技术位置角计算技术位置角校准技术永磁同步电机转子初始位置角在线检测方法的应用场景和优势应用场景检测方法的优势实际应用案例分析应用前景展望永磁同步电机转子初始位置角在线检测方法的实现过程和注意事项实现过程简述实验设备和参数设置实验结果分析和验证注意事项和使用建议永磁同步电机转子初始位置