
永磁同步电机转子位置检测及初始位置标定方法.pdf

雨巷****凝海

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
永磁同步电机转子位置检测及初始位置标定方法.pdf
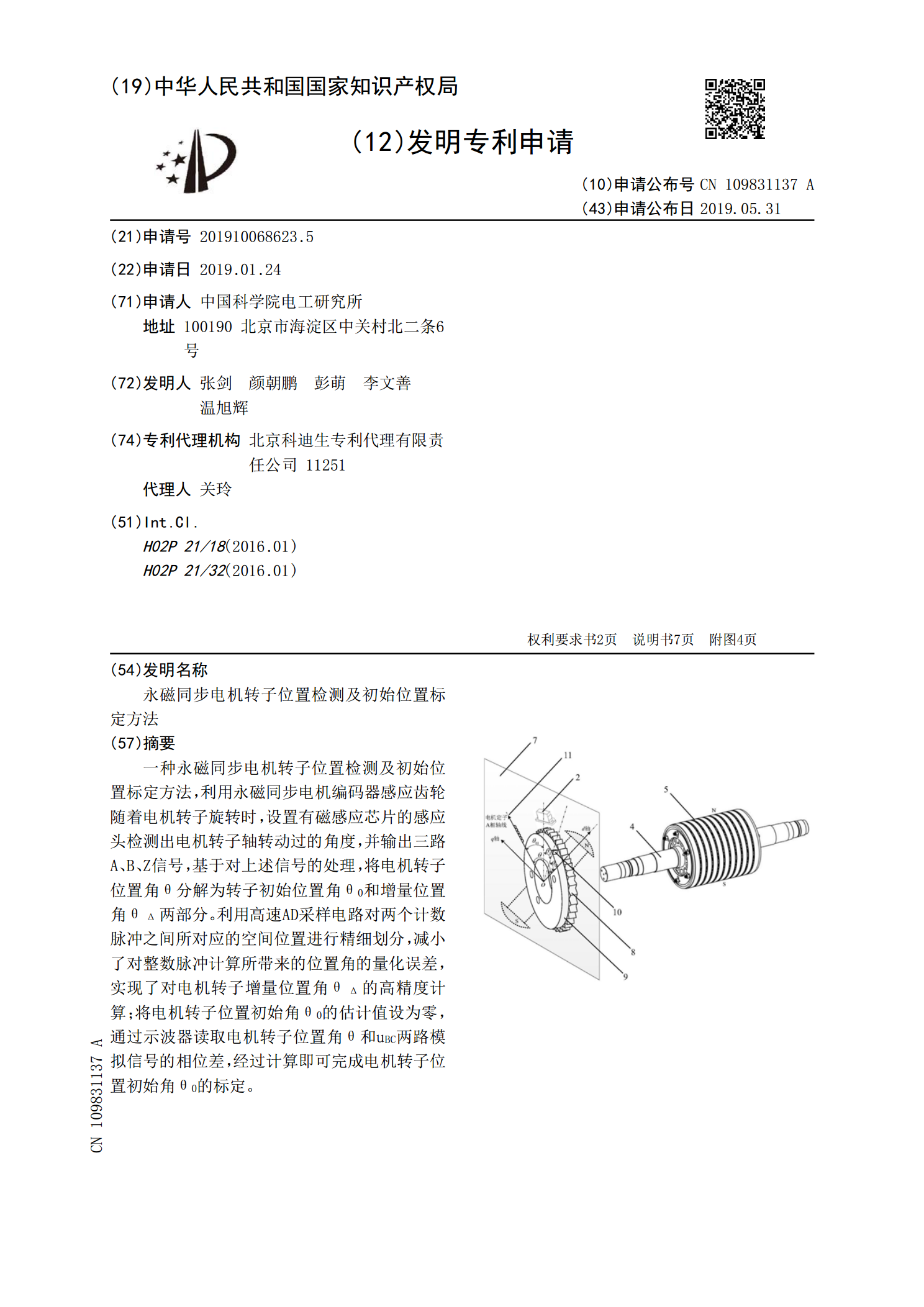
一种永磁同步电机转子位置检测及初始位置标定方法,利用永磁同步电机编码器感应齿轮随着电机转子旋转时,设置有磁感应芯片的感应头检测出电机转子轴转动过的角度,并输出三路A、B、Z信号,基于对上述信号的处理,将电机转子位置角θ分解为转子初始位置角θ
永磁同步电机转子初始位置角的检测方法、装置及设备.pdf
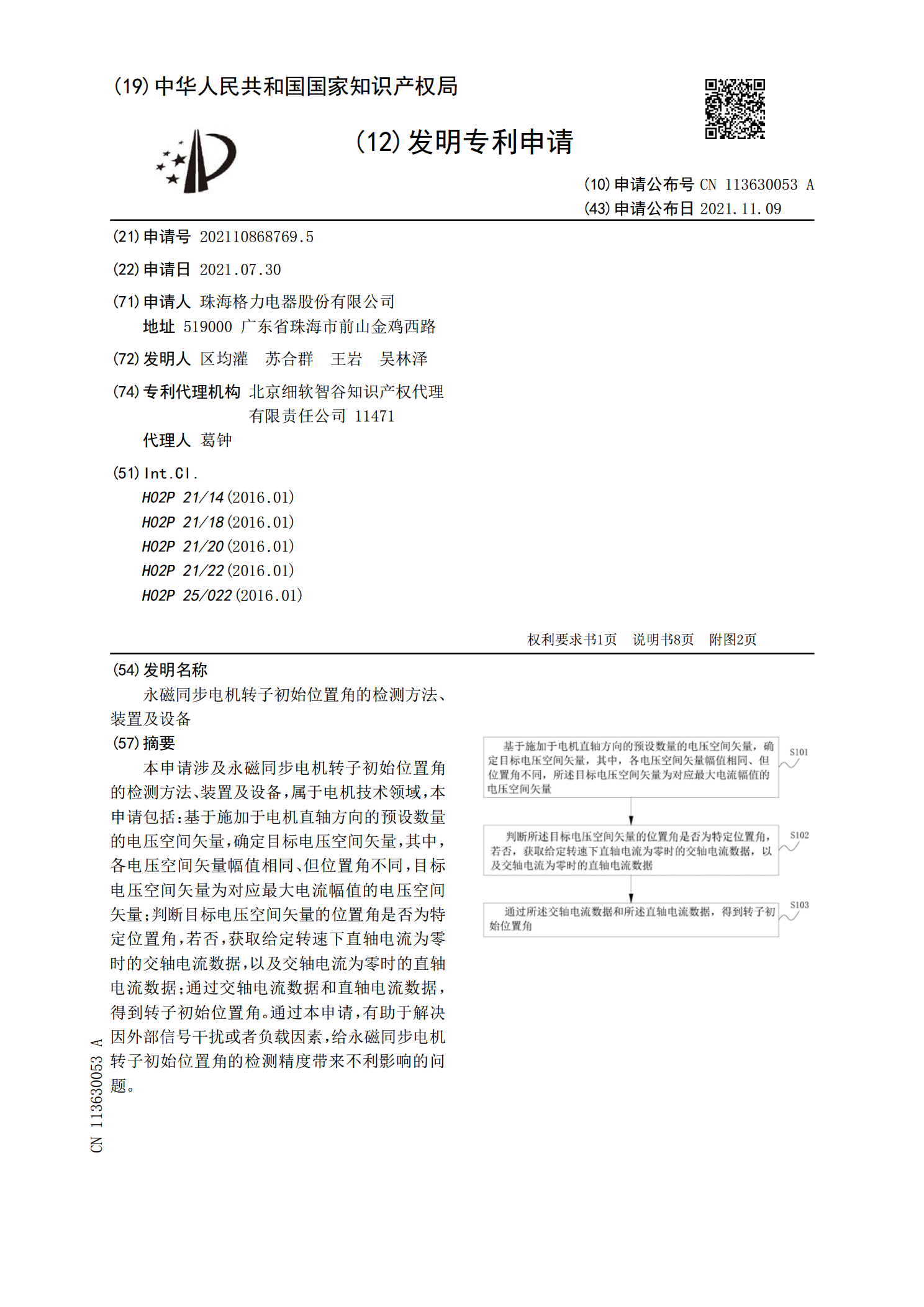
本申请涉及永磁同步电机转子初始位置角的检测方法、装置及设备,属于电机技术领域,本申请包括:基于施加于电机直轴方向的预设数量的电压空间矢量,确定目标电压空间矢量,其中,各电压空间矢量幅值相同、但位置角不同,目标电压空间矢量为对应最大电流幅值的电压空间矢量;判断目标电压空间矢量的位置角是否为特定位置角,若否,获取给定转速下直轴电流为零时的交轴电流数据,以及交轴电流为零时的直轴电流数据;通过交轴电流数据和直轴电流数据,得到转子初始位置角。通过本申请,有助于解决因外部信号干扰或者负载因素,给永磁同步电机转子初始位

永磁同步电机初始转子位置估计方法的研究的中期报告.docx
永磁同步电机初始转子位置估计方法的研究的中期报告中期报告一、研究背景永磁同步电机在电动汽车,机床等领域应用广泛。在永磁同步电机控制中,精确的转子位置估计对于控制器的控制精度起到至关重要的作用。而针对永磁同步电机初始转子位置估计的研究一直是该领域研究的热点和难点。本研究旨在设计一种准确性高、鲁棒性好的永磁同步电机初始转子位置估计方法,提高永磁同步电机控制精度和运行稳定性。二、研究内容本次报告主要研究了永磁同步电机初始转子位置估计方法的相关理论,并进行了理论模拟验证,具体包括以下内容:1.永磁同步电机的原理介
表面式永磁同步电机初始转子位置估计技术.pdf
第26卷第22期中国电机工程学报Vol.26No.22Nov.20062006年11月ProceedingsoftheCSEE©2006Chin.Soc.forElec.Eng.文章编号0258-8013(2006)22-0104-06中图分类号TM921TM35文献标识码A学科分类号470⋅40表面式永磁同步电机初始转子位置估计技术韦鲲金辛海(上海新时达电气有限公司研发中心上海市嘉定区201802)InitialRotorPositionEstimateTechniqueonSurfaceMounted

一种永磁同步电机转子初始位置在线辨识方法.pdf
本发明公开了一种永磁同步电机转子初始位置在线辨识方法,包括:设定电机和旋变极对数及初始位置在线辨识期望电流值;在0电角度位置根据期望电流值进行A相电流闭环调节,记录旋变位置值,校对三相电流值;在2π/3电角度位置根据期望电流值进行B相电流闭环调节,记录旋变位置值,校对三相电流值和旋变数值;在4π/3电角度位置时根据期望电流值进行C相电流闭环调节,记录旋变位置值,校对三相电流值和旋变数值;解析转子初始位置。本发明能克服电压开环调节的响应慢、电流误差大、计算冗杂等缺点,适应全电压范围;能识别电机三相线和旋变线