
基于柔弹性驱动关节的混联外骨骼式上肢康复机器人的设计综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于柔弹性驱动关节的混联外骨骼式上肢康复机器人的设计综述报告.docx
基于柔弹性驱动关节的混联外骨骼式上肢康复机器人的设计综述报告引言:近年来,上肢康复机器人在康复领域得到了广泛的研究和应用。混联外骨骼式上肢康复机器人,作为一种新型的康复设备,通过强大的力量和精确的控制,为患者提供全方位的上肢康复训练。柔弹性驱动关节作为混联外骨骼式上肢康复机器人的核心组件,具有优异的力传递性能和精确的控制能力。本综述报告将对基于柔弹性驱动关节的混联外骨骼式上肢康复机器人的设计进行全面的概述和评估,以期为相关研究者提供参考和启发。一、柔弹性驱动关节的原理和优势柔弹性驱动关节是一种基于弹性元件

基于外骨骼的上肢康复机器人设计与研究.docx
基于外骨骼的上肢康复机器人设计与研究摘要随着科技和医疗技术的不断进步,智能康复机器人成为一种越来越被广泛关注的康复技术。本文基于外骨骼的上肢康复机器人,介绍了其设计和研究,探讨了其康复效果和未来发展趋势。该机器人可以帮助患者恢复上肢的运动能力,对肢体功能康复起到重要的作用,具有广阔的应用前景。关键字:外骨骼;上肢康复机器人;设计;研究AbstractWiththecontinuousprogressoftechnologyandmedicaltechnology,Intelligentrehabilita

基于外骨骼的上肢康复机器人设计与研究的开题报告.docx
基于外骨骼的上肢康复机器人设计与研究的开题报告一、研究背景近年来,基于外骨骼的上肢康复机器人得到了广泛的关注和发展。上肢康复机器人是一种新型的康复设备,可以帮助肢体失能或功能障碍的患者进行康复训练,提高肢体的运动能力和生活自理能力。目前,国内外的研究主要集中在智能化、轻便化、个性化等方面的研究。在外骨骼机器人康复领域中,根据其设计形式可以分为基于刚性骨架和柔性骨架两种类型。基于刚性骨架的外骨骼具有结构简单、精度高、力矩大等优点,但缺点是易造成对关节的刚性束缚,使自主运动受限制;基于柔性骨架的外骨骼具有柔性
外骨骼式上肢康复机器人.pdf
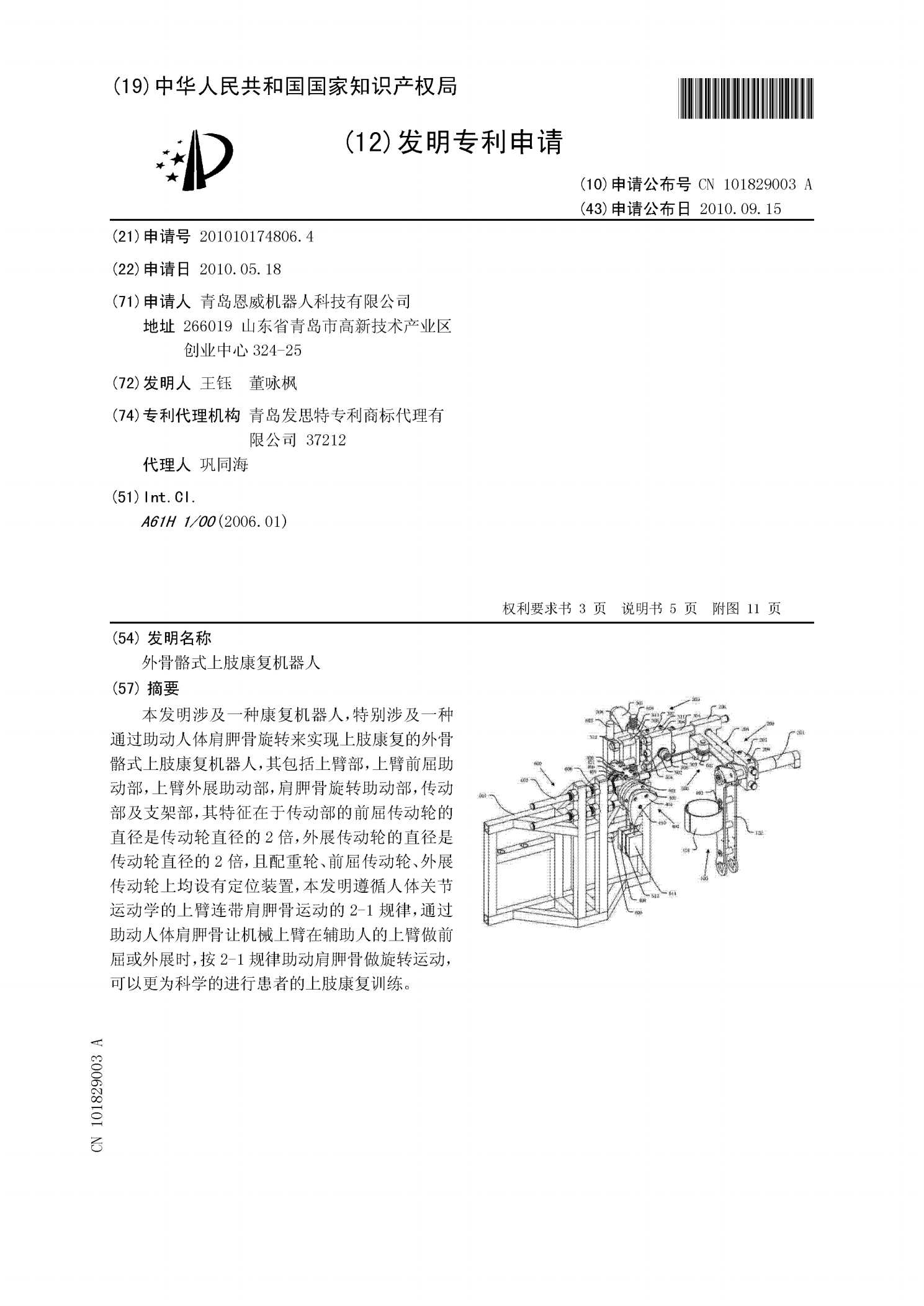
本发明涉及一种康复机器人,特别涉及一种通过助动人体肩胛骨旋转来实现上肢康复的外骨骼式上肢康复机器人,其包括上臂部,上臂前屈助动部,上臂外展助动部,肩胛骨旋转助动部,传动部及支架部,其特征在于传动部的前屈传动轮的直径是传动轮直径的2倍,外展传动轮的直径是传动轮直径的2倍,且配重轮、前屈传动轮、外展传动轮上均设有定位装置,本发明遵循人体关节运动学的上臂连带肩胛骨运动的2-1规律,通过助动人体肩胛骨让机械上臂在辅助人的上臂做前屈或外展时,按2-1规律助动肩胛骨做旋转运动,可以更为科学的进行患者的上肢康复训练。?

基于柔绳传动的外骨骼柔性关节驱动装置.pdf
本发明公开了一种基于柔绳传动的外骨骼柔性关节驱动装置,它包括机架、电机、关节、绕线装置和柔绳,关节的箱体和绕线装置分别与机架固定连接,电机通过联轴器与绕线装置连接;柔绳缠绕在绕线装置上,并且在由绕线装置引出后,柔绳的两端分别与关节的固定轮固定连接。本发明在精确实现传动的同时,较大程度地减轻了外骨骼康复治疗装置的重量,减轻患者的负担。