
扩展卡尔曼滤波matlab程序.doc

xf****65


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

扩展卡尔曼滤波matlab程序.doc
文件一::%THISPROGRAMISFORIMPLEMENTATIONOFDISCRETETIMEPROCESSEXTENDEDKALMANFILTER%FORGAUSSIANANDLINEARSTOCHASTICDIFFERENCEEQUATION.%By(R.C.R.C.R),SPLABS,MPL.%(17JULY2005).%HelpbyAarthiNadarajanisacknowledged.%(drawbackofEKFiswhennonlinearityishigh,wecanextend

扩展卡尔曼滤波算法的matlab程序.doc
clearallv=150;%%目标速度v_sensor=0;%%传感器速度t=1;%%扫描周期xradarpositon=0;%%传感器坐标yradarpositon=0;%%ppred=zeros(4,4);Pzz=zeros(2,2);Pxx=zeros(4,2);xpred=zeros(4,1);ypred=zeros(2,1);sumx=0;sumy=0;sumxukf=0;sumyukf=0;sumxekf=0;sumyekf=0;%%%统计的初值L=4;alpha=1;kalpha=0;be

(完整word版)扩展卡尔曼滤波算法的matlab程序.doc
clearallv=150;%%目标速度v_sensor=0;%%传感器速度t=1;%%扫描周期xradarpositon=0;%%传感器坐标yradarpositon=0;%%ppred=zeros(4,4);Pzz=zeros(2,2);Pxx=zeros(4,2);xpred=zeros(4,1);ypred=zeros(2,1);sumx=0;sumy=0;sumxukf=0;sumyukf=0;sumxekf=0;sumyekf=0;%%%统计的初值L=4;alpha=1;kalpha=0;be

(完整word版)扩展卡尔曼滤波算法的matlab程序.doc
clearallv=150;%%目标速度v_sensor=0;%%传感器速度t=1;%%扫描周期xradarpositon=0;%%传感器坐标yradarpositon=0;%%ppred=zeros(4,4);Pzz=zeros(2,2);Pxx=zeros(4,2);xpred=zeros(4,1);ypred=zeros(2,1);sumx=0;sumy=0;sumxukf=0;sumyukf=0;sumxekf=0;sumyekf=0;%%%统计的初值L=4;alpha=1;kalpha=0;be
卡尔曼滤波两例题含matlab程序汇总.pdf
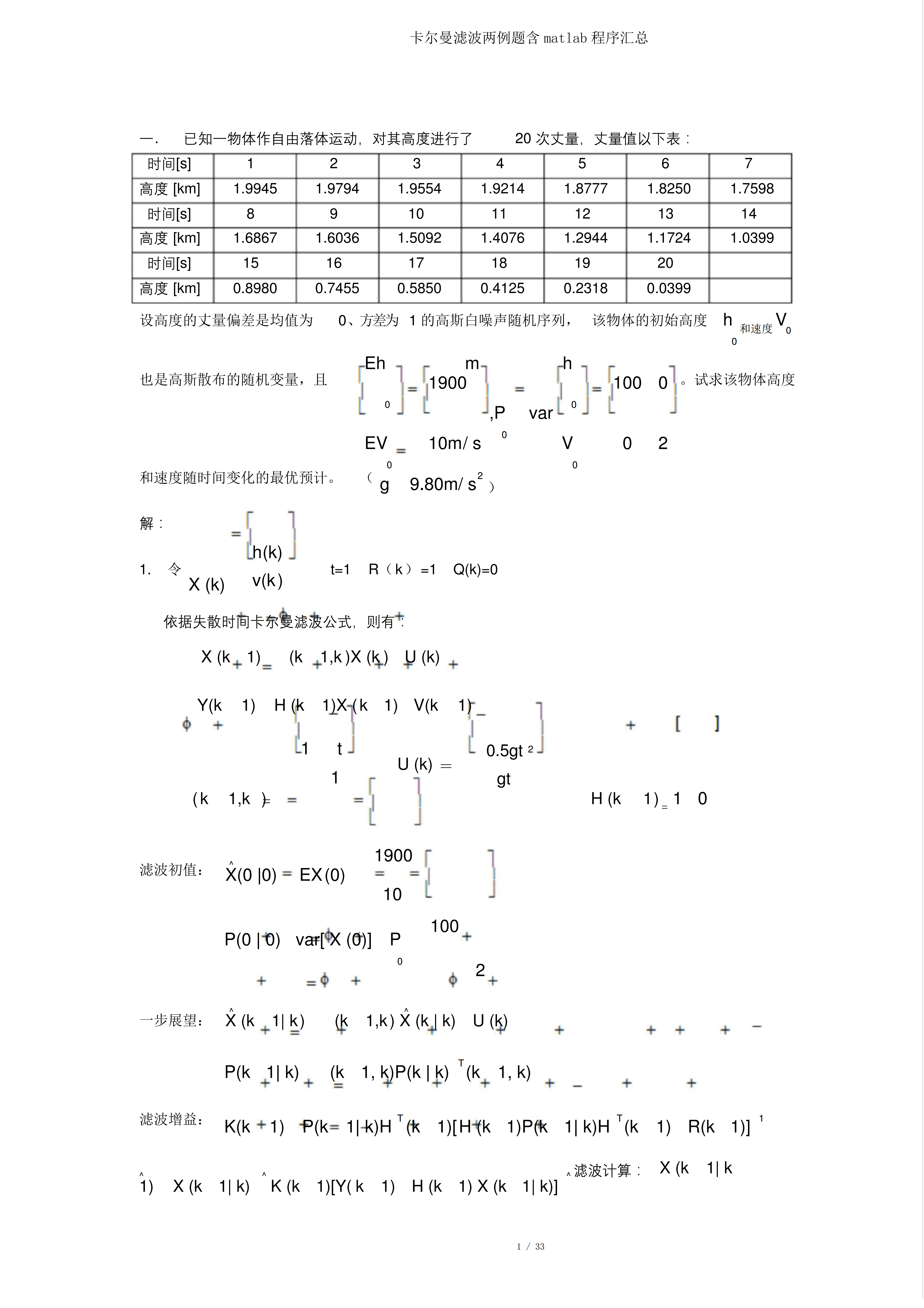
卡尔曼滤波两例题含matlab程序汇总一.已知一物体作自由落体运动,对其高度进行了20次丈量,丈量值以下表:时间[s]1234567高度[km]1.99451.97941.95541.92141.87771.82501.7598时间[s]891011121314高度[km]1.68671.60361.50921.40761.29441.17241.0399时间[s]151617181920高度[km]0.89800.74550.58500.41250.23180.0399设高度的丈量偏差是均值为0、方差为