
越障爬杆机器人.pdf

冷霜****魔王

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
越障爬杆机器人.pdf
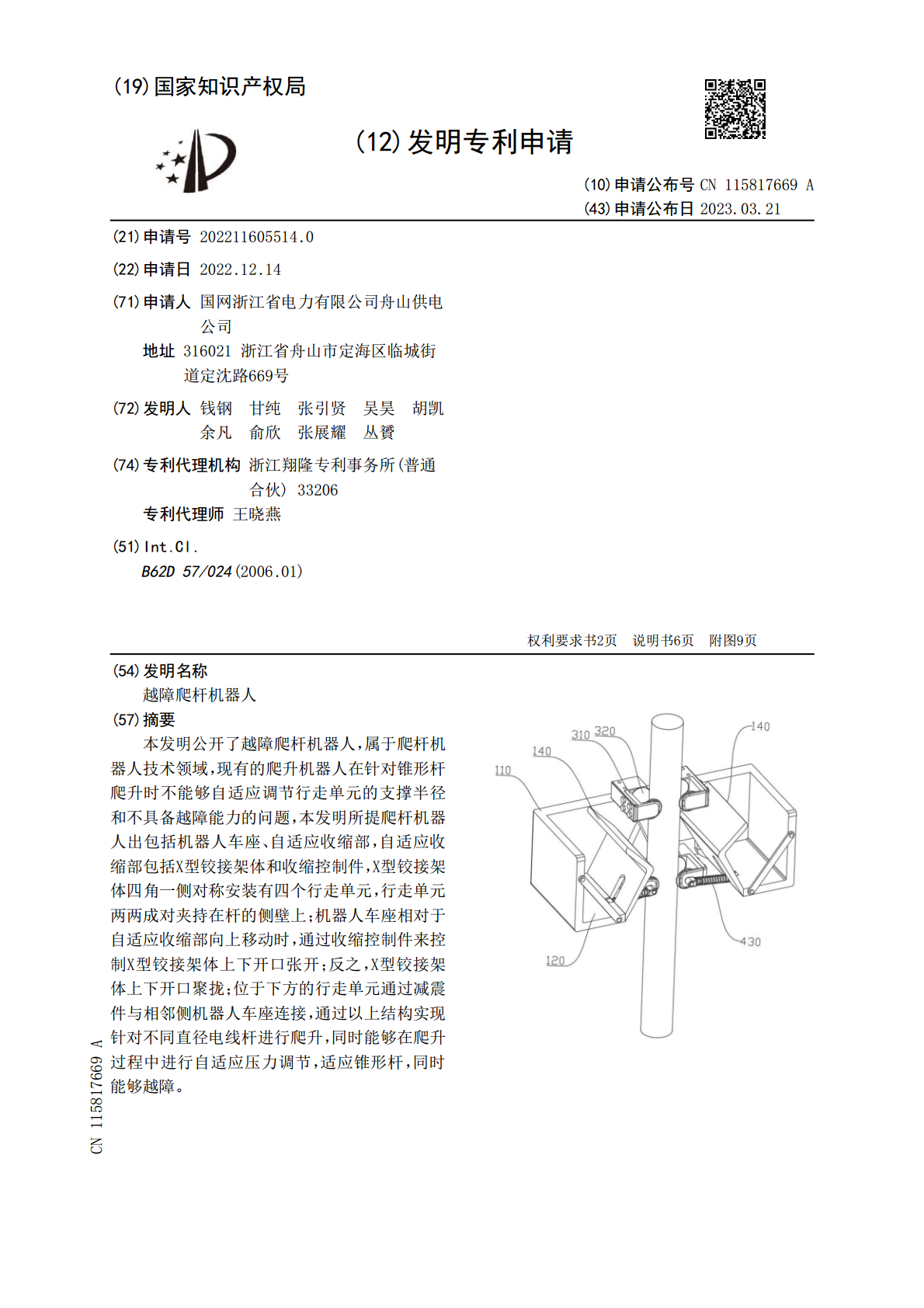
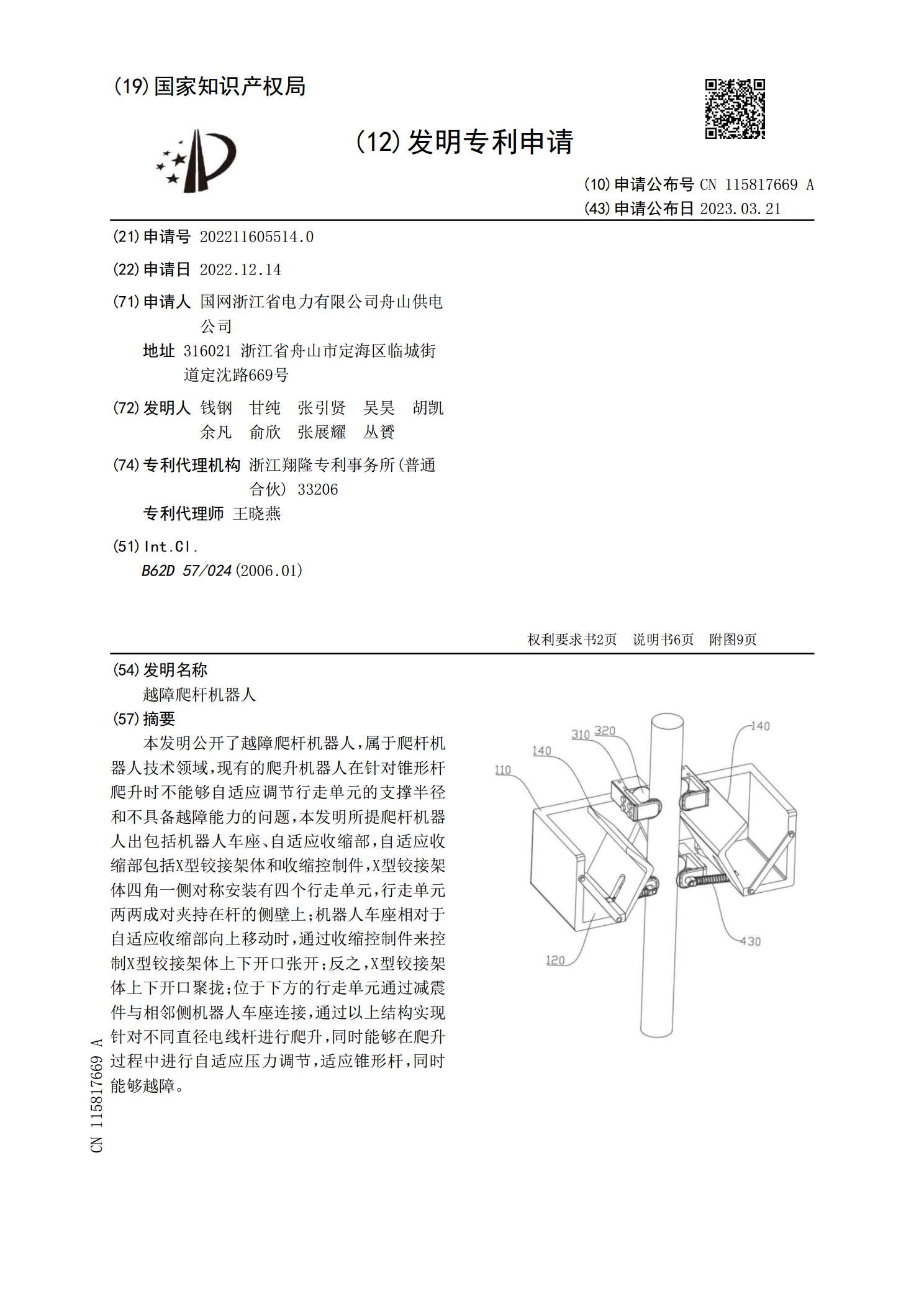
本发明公开了越障爬杆机器人,属于爬杆机器人技术领域,现有的爬升机器人在针对锥形杆爬升时不能够自适应调节行走单元的支撑半径和不具备越障能力的问题,本发明所提爬杆机器人出包括机器人车座、自适应收缩部,自适应收缩部包括X型铰接架体和收缩控制件,X型铰接架体四角一侧对称安装有四个行走单元,行走单元两两成对夹持在杆的侧壁上;机器人车座相对于自适应收缩部向上移动时,通过收缩控制件来控制X型铰接架体上下开口张开;反之,X型铰接架体上下开口聚拢;位于下方的行走单元通过减震件与相邻侧机器人车座连接,通过以上结构实现针对不同

越障爬杆机器人.pdf
本发明公开了一种越障爬杆机器人,包括抱住目标杆的固定基座以及驱动固定基座沿目标杆上升和下降的风机组件;所述固定基座上围绕目标杆的圆周方向设有若干组越障轮组件,其中至少一组越障轮组件通过主动驱动装置向目标杆主动压紧,其余的越障轮组件通过弹性连接件与目标杆被动压紧。本发明的越障爬杆机器人在攀爬时使用涵道风力推进,速度较快,同时U型轮构成的越障轮组件具有跨越一定障碍的能力,且通过摆杆和伸缩杆的配合可实现一定直径范围的目标杆的快速攀爬和锁止定位,同时兼顾了轮式爬杆机器人的爬杆速度和臂式爬杆机器人的越障能力。

一种越障爬杆机器人.pdf
本发明涉及一种越障爬杆机器人。该机器人由机架作为基础,在机架上、中、下装有三组夹紧臂支架,通过夹紧臂转轴将夹紧臂装在夹紧臂支架上,在机架上装有夹紧臂同步电机,通过夹紧臂同步带传动驱动夹紧臂转轴转动,带动夹紧臂转动;浮动杆支架装在夹紧臂上,通过销轴将浮动杆连接在浮动杆支架上,浮动杆的两端装有驱动轮支架,通过驱动轮转轴将驱动轮装在驱动轮支架上,在浮动杆上装有驱动轮同步电机,通过驱动轮同步带传动带动驱动轮转动,使机器人上下运动;在该机器人上装有压力传感器、障碍判断传感器等电器装置,各驱动电机的动作、夹紧力大小的
一种轮式越障爬杆机器人.pdf
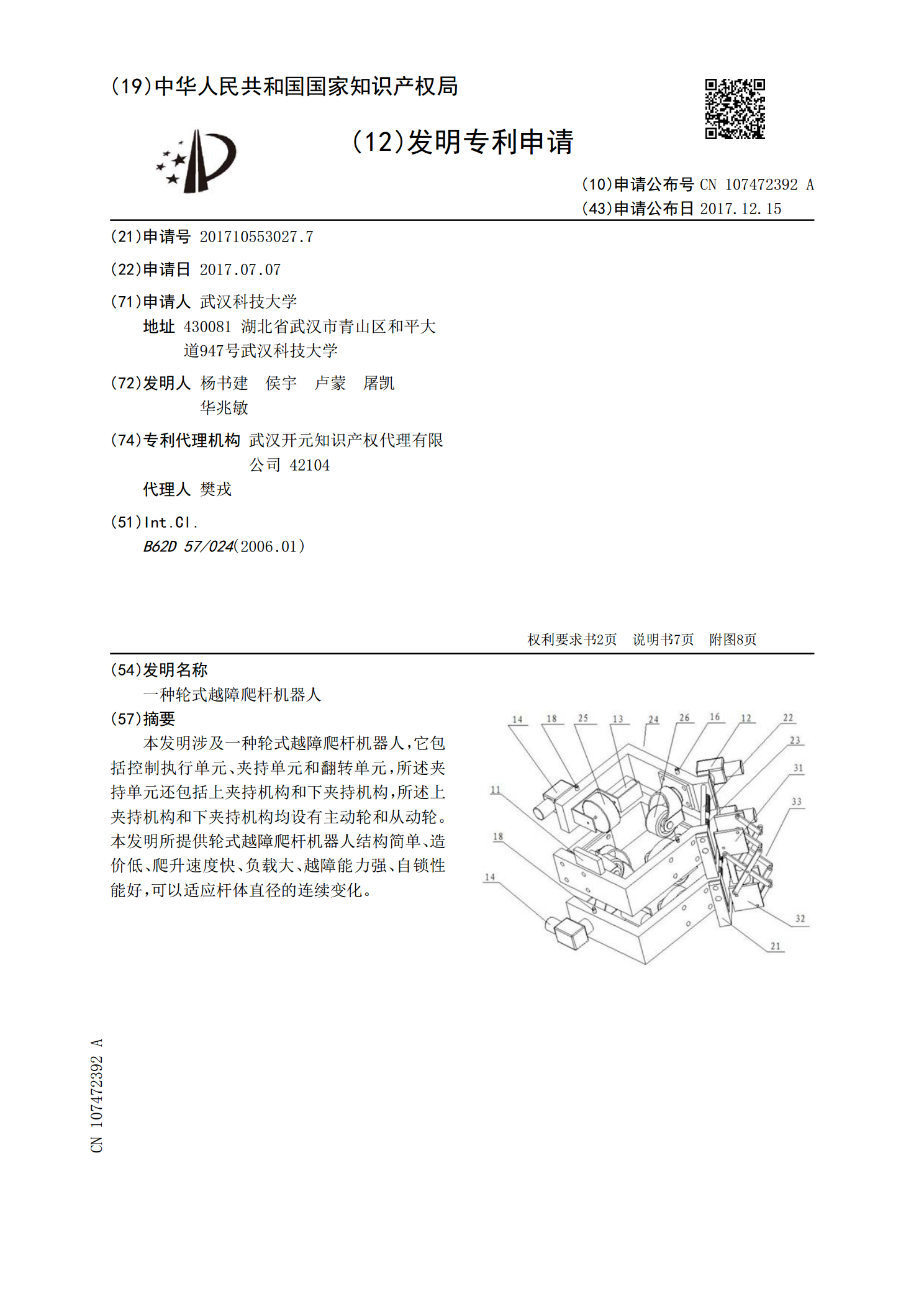
本发明涉及一种轮式越障爬杆机器人,它包括控制执行单元、夹持单元和翻转单元,所述夹持单元还包括上夹持机构和下夹持机构,所述上夹持机构和下夹持机构均设有主动轮和从动轮。本发明所提供轮式越障爬杆机器人结构简单、造价低、爬升速度快、负载大、越障能力强、自锁性能好,可以适应杆体直径的连续变化。

一种具有越障功能的工业爬杆机器人.pdf
本发明公开了一种具有越障功能的工业爬杆机器人,包括安装在主体上的两个机械手臂,其每个机械手臂分别由爬行导向机构、自锁驱动机构、旋转脱离机构、传动机构所组成;爬行导向机构分别包括有两相对设置且可用于爬行的橡胶轮,爬行导向机构的后端部分别安装有与其对应配合的自锁驱动机构;自锁驱动机构包括有与爬行导向机构连接的连接轴,所述自锁驱动机构的一侧通过连接轴连接有旋转脱离机构;所述旋转脱离机构为可以实现两个自由度转动的机构,该机构中通过后端的传动机构驱动。本发明通过设计自锁驱动机构和旋转脱离机构,使机器人可以实现不同直