
汽车驱动轮电子差速控制方法研究的任务书.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

汽车驱动轮电子差速控制方法研究的任务书.docx
汽车驱动轮电子差速控制方法研究的任务书任务书一、课题背景与意义随着汽车技术的不断发展,越来越多的汽车开始使用四驱系统,以提供更好的操控性能和行驶稳定性。而在四驱系统中,汽车驱动轮电子差速控制技术作为关键技术之一,对于提升车辆的操控能力和稳定性具有重要意义。汽车驱动轮电子差速控制技术是利用车辆动力系统的电子控制单元(ECU)来控制车辆左右驱动轮的转速差异,从而实现更好的动力分配和抓地力控制。通过准确地控制差速器的工作状态,可以使车辆在转弯、加速和制动等情况下更加稳定和平稳,减小驱动轮打滑和侧滑,提升行车安全
汽车及其电子差速控制方法和控制装置.pdf
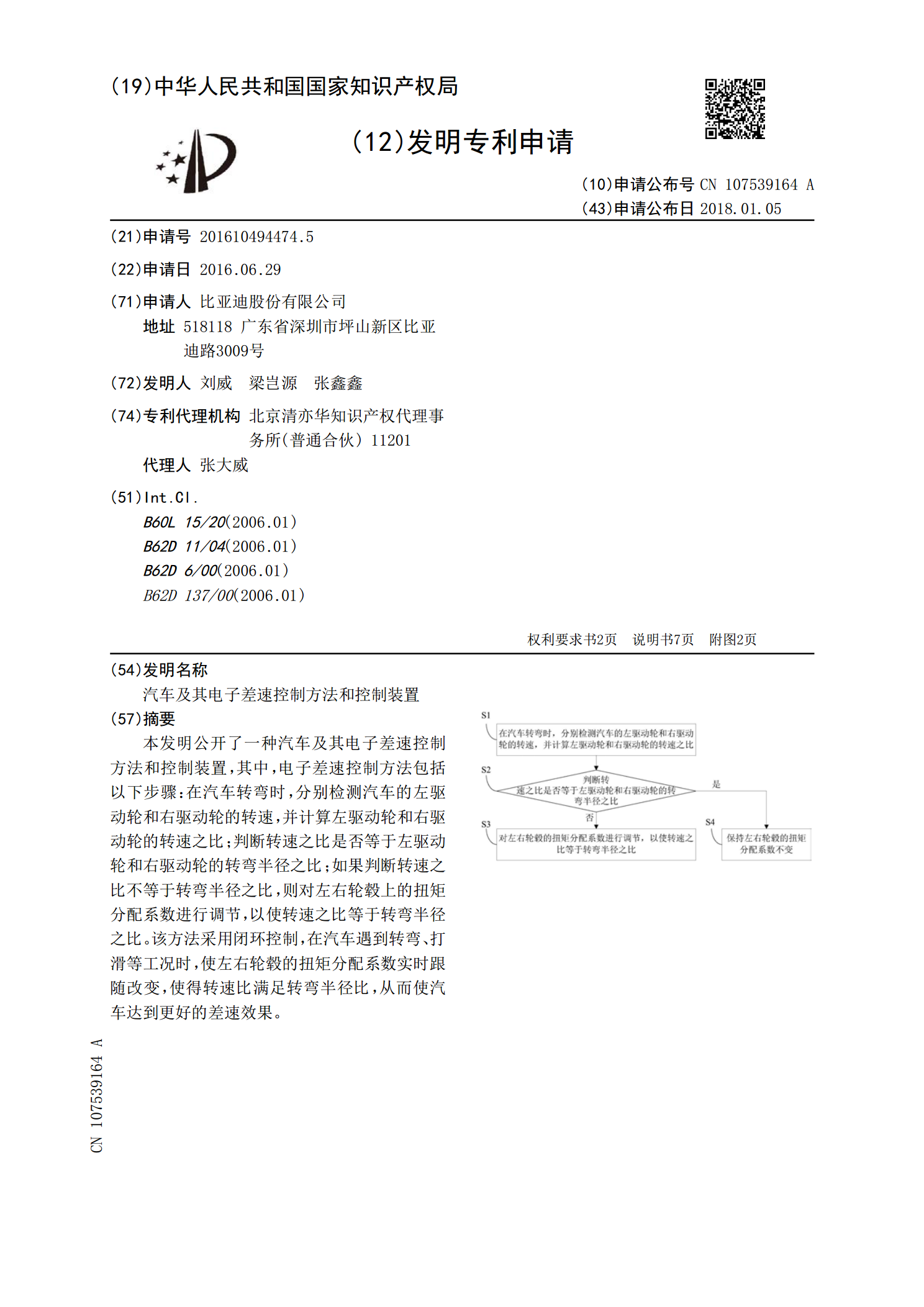
本发明公开了一种汽车及其电子差速控制方法和控制装置,其中,电子差速控制方法包括以下步骤:在汽车转弯时,分别检测汽车的左驱动轮和右驱动轮的转速,并计算左驱动轮和右驱动轮的转速之比;判断转速之比是否等于左驱动轮和右驱动轮的转弯半径之比;如果判断转速之比不等于转弯半径之比,则对左右轮毂上的扭矩分配系数进行调节,以使转速之比等于转弯半径之比。该方法采用闭环控制,在汽车遇到转弯、打滑等工况时,使左右轮毂的扭矩分配系数实时跟随改变,使得转速比满足转弯半径比,从而使汽车达到更好的差速效果。

电动汽车电子差速控制策略研究.pptx
电动汽车电子差速控制策略研究目录添加章节标题电动汽车电子差速控制策略概述电子差速控制的定义和作用电子差速控制系统的基本组成电子差速控制策略的研究意义电动汽车电子差速控制策略研究现状国内外研究现状及发展趋势现有电子差速控制策略的优缺点分析现有电子差速控制策略的实验验证及实际应用情况电动汽车电子差速控制策略设计方法基于数学模型的差速控制策略设计基于模糊逻辑的差速控制策略设计基于滑模控制的差速控制策略设计基于最优控制的差速控制策略设计电动汽车电子差速控制策略优化方法基于遗传算法的差速控制策略优化基于粒子群算法的
电动汽车电子差速控制技术研究综述.pptx
汇报人:/目录0102电子差速控制技术的定义电子差速控制技术在电动汽车中的应用电子差速控制技术的优势03国内外研究现状研究热点和难点现有研究成果和结论04电子差速控制系统的组成工作原理的详细解释与传统差速控制的比较05控制策略和控制算法硬件实现方式软件实现方式06应用场景介绍典型案例分析案例的优缺点分析07技术发展趋势技术发展面临的挑战和问题技术发展的未来展望汇报人:

电动汽车电子差速系统研究的任务书.docx
电动汽车电子差速系统研究的任务书任务书1.研究背景电动汽车是以电动机驱动车辆行驶的汽车,由于电动汽车的环保性、低噪音、低能耗以及高效能等特点,在现代社会中得到了广泛的关注和普及。随着电动汽车技术的不断发展,人们对其性能和功能的要求也越来越高,而电子差速系统作为其中的一项重要技术,能够有效地提升电动汽车的性能和安全性,因此对其进行深入研究至关重要。2.研究目的本研究的目的是深入研究电子差速系统的原理、构成以及工作方式,分析其在电动汽车中的应用现状和发展趋势,通过对相关文献、数据和知识的调研和分析,对该技术的