
机械臂带电作业中一种基于目标识别的手眼标定方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机械臂带电作业中一种基于目标识别的手眼标定方法.docx
机械臂带电作业中一种基于目标识别的手眼标定方法标题:机械臂带电作业中基于目标识别的手眼标定方法摘要:机械臂在工业和智能制造领域扮演着重要的角色,而在一些特定场景下,机械臂需要进行带电作业,这对于保障生产效率和人员安全至关重要。本论文旨在提出一种基于目标识别的手眼标定方法,以提高机械臂在带电作业中的精确性与可靠性。首先,介绍了机械臂带电作业的背景和重要性,然后详细介绍了现有的手眼标定方法及存在的问题。接着,提出了一种基于目标识别的手眼标定方法,并详细描述了该方法的步骤。最后,通过实验验证了该方法的有效性和可

一种机械臂手眼标定装置及方法.pdf
本发明适用于机器人视觉技术领域,提供了一种机械臂手眼标定装置及方法,装置包括:垂直标定板,垂直标定板由两标定板组成,两标定板垂直固定,两标定板的交线位于标定板的侧边,标定板的表面设有定位点,定位点关于交线对称设立,垂直标定板通过两长度可调节的支撑杆与行架固定;圆盘,圆盘的一侧设有滑块,滑块与滑轨滑动连接,滑轨垂直于行架设置;机械臂设于行架的下方,机械臂的末端装有标定头,机械臂通过底座与模组滑动连接,底座上设有激光雷达,激光雷达位于标定板的下方。标定板设计为垂直状,便于建立工具坐标系,标定板上设计了定位点,
基于插值细分的机械臂手眼标定算法.pptx
汇报人:/目录0102算法定义算法应用场景算法优势算法局限03插值概念细分方法插值细分在机械臂手眼标定中的应用插值细分算法的实现流程04数据准备相机坐标系与世界坐标系的关系确定基于插值细分的机械臂手眼标定过程标定结果验证与优化05实验设置与数据来源实验结果展示结果分析与其他算法的比较06本文工作总结未来研究方向汇报人:
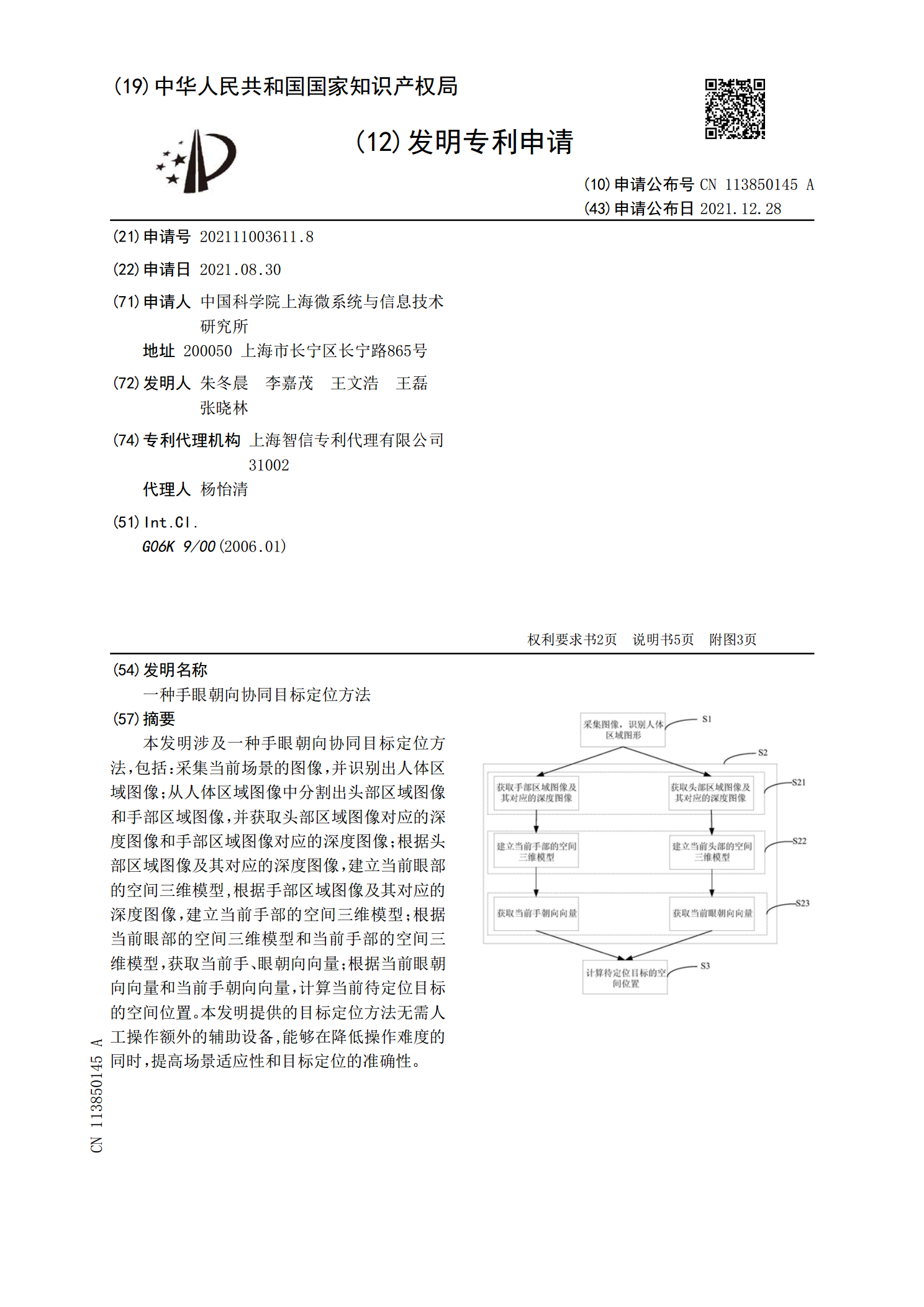
一种手眼朝向协同目标定位方法.pdf
本发明涉及一种手眼朝向协同目标定位方法,包括:采集当前场景的图像,并识别出人体区域图像;从人体区域图像中分割出头部区域图像和手部区域图像,并获取头部区域图像对应的深度图像和手部区域图像对应的深度图像;根据头部区域图像及其对应的深度图像,建立当前眼部的空间三维模型,根据手部区域图像及其对应的深度图像,建立当前手部的空间三维模型;根据当前眼部的空间三维模型和当前手部的空间三维模型,获取当前手、眼朝向向量;根据当前眼朝向向量和当前手朝向向量,计算当前待定位目标的空间位置。本发明提供的目标定位方法无需人工操作额外

基于Halcon的固定视点手眼标定方法.pptx
基于Halcon的固定视点手眼标定方法目录添加目录项标题Halcon简介什么是HalconHalcon的特点和优势Halcon的应用领域固定视点手眼标定方法手眼标定简介固定视点手眼标定方法的原理固定视点手眼标定方法的步骤固定视点手眼标定方法的优缺点基于Halcon的固定视点手眼标定方法实现标定前的准备工作基于Halcon的固定视点手眼标定方法的具体实现步骤标定结果的分析和优化实验验证与结果分析实验环境与数据集实验过程与结果结果分析实验结论总结与展望基于Halcon的固定视点手眼标定方法的优势与不足未来研究