
基于计算机视觉的相机标定方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于计算机视觉的相机标定方法.docx
基于计算机视觉的相机标定方法基于计算机视觉的相机标定方法摘要:相机标定是计算机视觉中的重要任务之一,它可以校正摄像机的图像,使得图像与真实场景更加匹配。本论文主要研究了基于计算机视觉的相机标定方法。首先介绍了相机标定的基本原理和步骤,然后探讨了目前常用的相机标定方法。同时,还讨论了基于特征点和基于标定板的相机标定方法,并分别对其优缺点进行了分析。最后,提出了一种基于深度学习的相机标定方法,并对其进行了实验验证。实验结果表明,该方法具有较高的精度和鲁棒性。1.引言相机标定是计算机视觉领域的一个重要研究课题。

基于单目视觉的GPS辅助相机外参数标定.docx
基于单目视觉的GPS辅助相机外参数标定基于单目视觉的GPS辅助相机外参数标定摘要:相机外参数标定是计算机视觉中的重要问题之一,它用于确定相机的位置和朝向,为视觉定位和导航提供基础。本文提出了一种基于单目视觉的GPS辅助相机外参数标定方法。通过使用GPS设备获取相机在三维空间中的位置信息,并结合视觉特征提取和匹配算法,实现了相机外参数的准确标定。实验结果表明,该方法能够有效地提高相机外参数标定的精度和鲁棒性。关键词:相机外参数标定,单目视觉,GPS辅助,特征匹配1.引言相机外参数标定是计算机视觉中一个重要的

基于相机标定的纹理映射方法.pptx
汇报人:目录PARTONE相机标定原理相机内外参数相机标定方法相机标定精度PARTTWO纹理映射原理纹理坐标系统纹理映射算法纹理映射效果PARTTHREE方法概述相机标定与纹理映射的关联实现步骤优势与局限性PARTFOUR应用领域实际效果展示与其他方法的比较适用范围与限制PARTFIVE当前研究的不足之处未来研究重点与方向技术发展趋势与展望THANKYOU

移动端视觉测量系统的相机快速标定方法.docx
移动端视觉测量系统的相机快速标定方法移动端视觉测量系统的相机快速标定方法摘要:随着移动端视觉测量系统的快速发展,相机快速标定成为其中的重要环节。相机标定是指对相机的内外参数进行计算和确定,以实现相机的准确成像和测量。本文主要介绍了移动端视觉测量系统的相机快速标定方法,并分析了其优缺点。通过实践证明,该方法能够快速、准确、方便地进行相机标定,适用于移动端的视觉测量系统。关键词:移动端;视觉测量系统;相机标定;内外参数;快速、准确、方便1引言移动端视觉测量系统是指集成在移动设备上的一种具备测量功能的图像处理系
基于云的相机标定.pdf
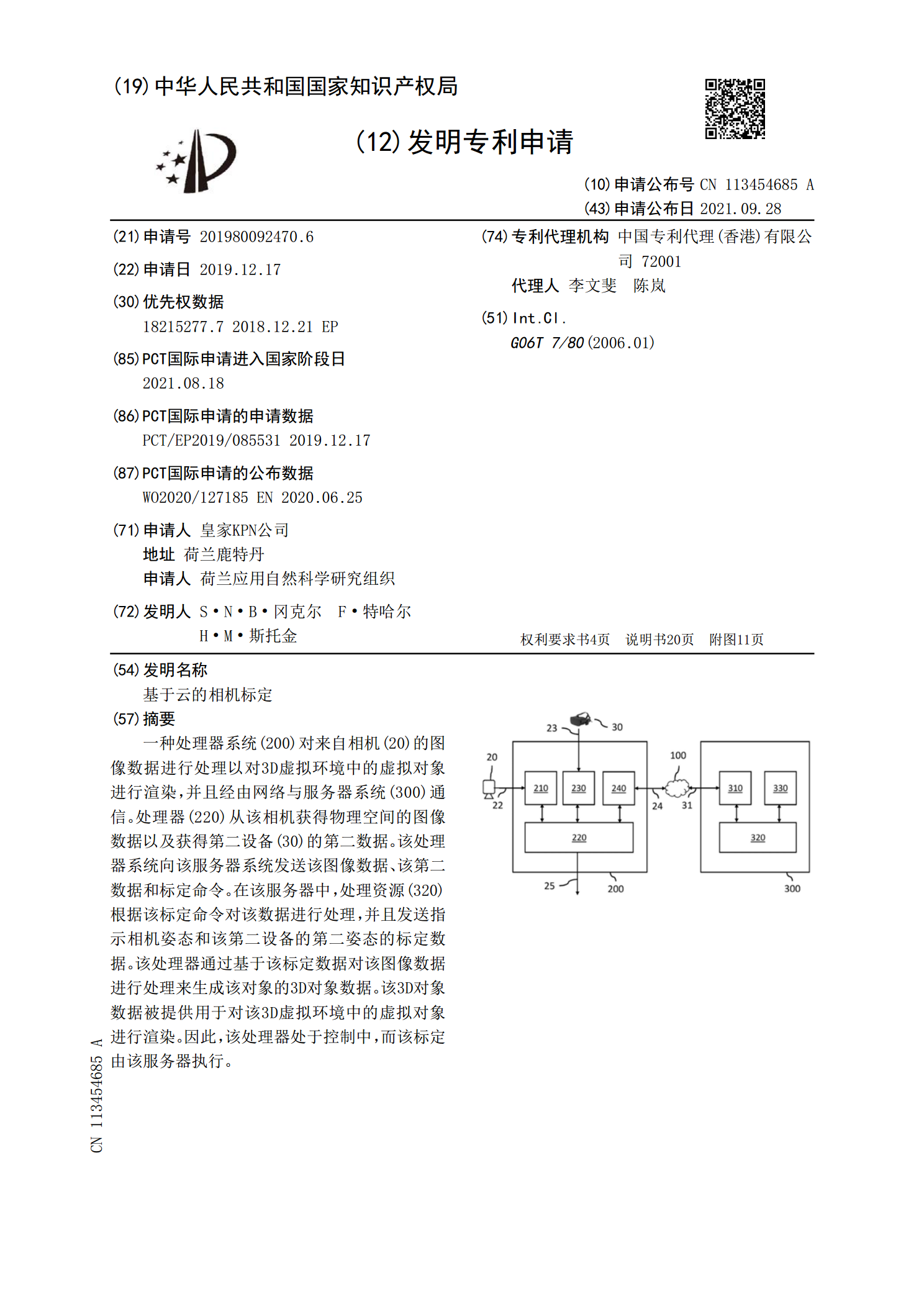
一种处理器系统(200)对来自相机(20)的图像数据进行处理以对3D虚拟环境中的虚拟对象进行渲染,并且经由网络与服务器系统(300)通信。处理器(220)从该相机获得物理空间的图像数据以及获得第二设备(30)的第二数据。该处理器系统向该服务器系统发送该图像数据、该第二数据和标定命令。在该服务器中,处理资源(320)根据该标定命令对该数据进行处理,并且发送指示相机姿态和该第二设备的第二姿态的标定数据。该处理器通过基于该标定数据对该图像数据进行处理来生成该对象的3D对象数据。该3D对象数据被提供用于对该3D虚