
基于路面结构的视觉定位技术.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于路面结构的视觉定位技术.docx
基于路面结构的视觉定位技术基于路面结构的视觉定位技术摘要:随着自动驾驶技术的快速发展,视觉定位技术作为自动驾驶系统中的关键环节得到了广泛应用。然而,由于视觉传感器的局限性以及环境的不确定性,传统视觉定位技术在复杂场景下的可靠性和鲁棒性较低。为了解决这一问题,本文提出了一种基于路面结构的视觉定位技术。该方法利用路面结构作为定位的参考,通过对路面纹理、路面颜色和路面几何信息的检测和匹配,实现了精确的视觉定位。实验结果表明,该方法在复杂场景下具有较高的定位精度和鲁棒性,适用于自动驾驶系统中的定位任务。关键词:视

基于瞳孔定位技术的视觉跟踪系统的研究.docx
基于瞳孔定位技术的视觉跟踪系统的研究摘要:瞳孔定位技术广泛应用于视觉跟踪系统中,通过识别和追踪瞳孔的位置,可以实现对眼球运动的跟踪和分析。本文主要介绍了基于瞳孔定位技术的视觉跟踪系统的研究。首先,介绍了瞳孔定位的原理和方法。然后,详细介绍了基于瞳孔定位的视觉跟踪系统的设计和实现,并讨论了其应用领域和前景。最后,对该系统的优缺点进行了分析,并提出了一些改进的建议。关键词:瞳孔定位;视觉跟踪;眼球运动1.引言视觉跟踪是计算机视觉领域的重要研究方向之一,它在目标识别、行为分析、用户界面等方面有着广泛的应用。瞳孔

基于机器视觉的测距与定位技术研究.docx
基于机器视觉的测距与定位技术研究摘要机器视觉的测距和定位技术在各个领域中被广泛应用。机器视觉的测距和定位技术是通过计算机视觉技术和数字信号处理技术,实现对视场中对象和其运动的测量和定位。这篇文章将介绍机器视觉系统的基本组成部分和工作流程,着重探讨了机器视觉测距和定位技术的实现方法。我们还介绍了机器视觉测距和定位技术在三维重建、机器人导航、虚拟现实等领域的应用。最后,我们总结了机器视觉测距和定位技术的发展趋势及其在实践中的应用前景。关键词:机器视觉、测距、定位、计算机视觉、数字信号处理技术。引言近年来,随着
一种基于视觉定位技术的点胶机双向视觉识别装置.pdf
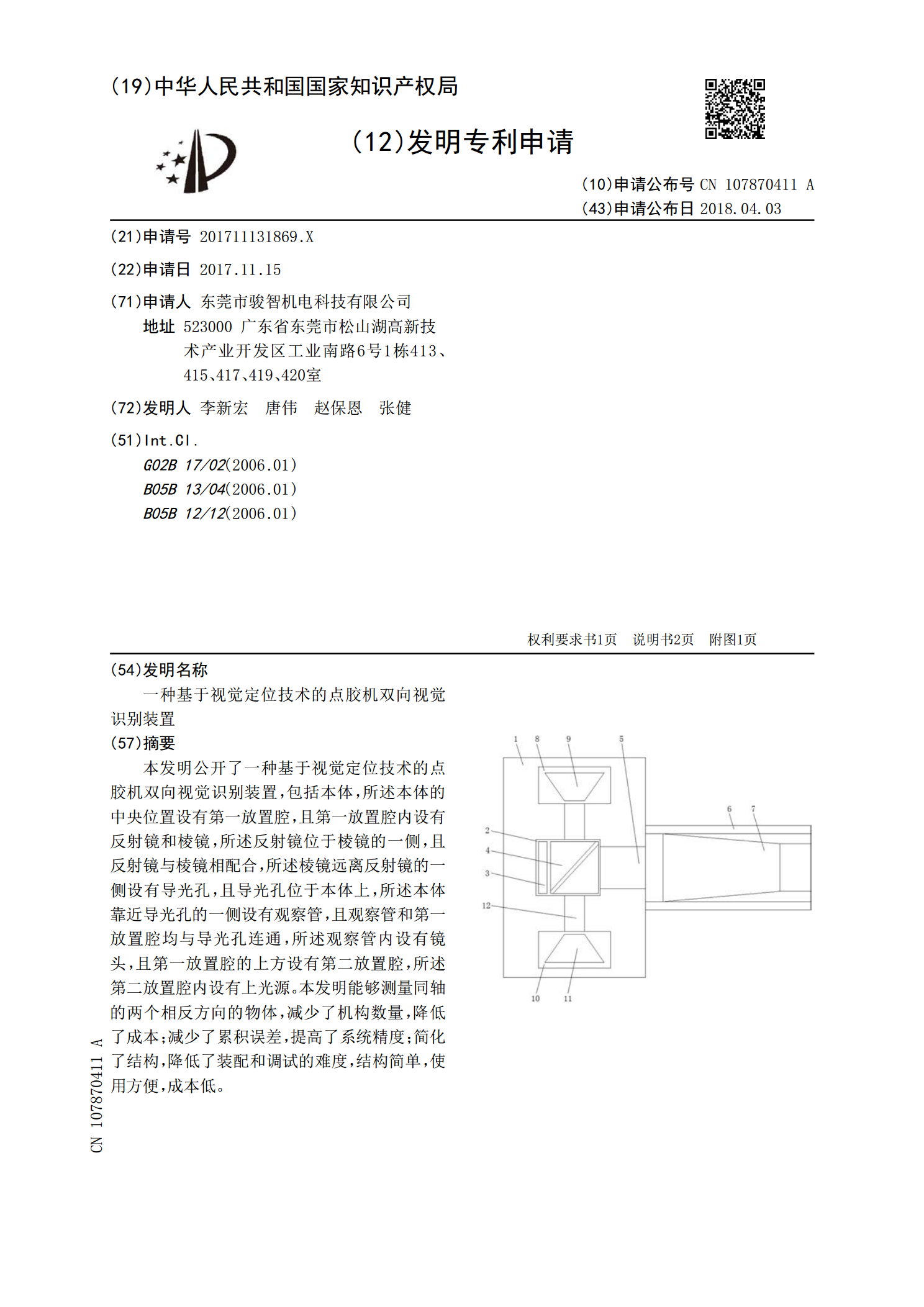
本发明公开了一种基于视觉定位技术的点胶机双向视觉识别装置,包括本体,所述本体的中央位置设有第一放置腔,且第一放置腔内设有反射镜和棱镜,所述反射镜位于棱镜的一侧,且反射镜与棱镜相配合,所述棱镜远离反射镜的一侧设有导光孔,且导光孔位于本体上,所述本体靠近导光孔的一侧设有观察管,且观察管和第一放置腔均与导光孔连通,所述观察管内设有镜头,且第一放置腔的上方设有第二放置腔,所述第二放置腔内设有上光源。本发明能够测量同轴的两个相反方向的物体,减少了机构数量,降低了成本;减少了累积误差,提高了系统精度;简化了结构,降低

基于图论的单目视觉路面识别技术研究.docx
基于图论的单目视觉路面识别技术研究基于图论的单目视觉路面识别技术研究摘要:随着自动驾驶技术的快速发展,视觉感知的重要性在道路场景中得到了广泛的认可。而在自动驾驶系统中,准确地辨别和识别路面的特征对于安全驾驶至关重要。本文以图论为基础,研究了单目视觉路面识别技术,通过构建和分析图模型,利用图论算法来实现对路面特征的准确识别。1.引言自动驾驶技术的迅速发展使得车辆能够自主地感知和理解道路环境。其中,视觉感知是最为常用和重要的一种感知方式。而对于自动驾驶系统而言,准确地辨别和识别道路上的特征对于车辆的安全驾驶至