
多无人机协同的稳定控制机理研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多无人机协同的稳定控制机理研究.docx
多无人机协同的稳定控制机理研究多无人机协同的稳定控制机理研究摘要:无人机技术的快速发展已经使得多无人机系统越来越受到关注。在现实应用场景中,多无人机协同的稳定控制是关键问题之一。本论文将重点研究多无人机协同的稳定控制机理,并提出了一种基于集体智能的方法。关键词:无人机、协同、稳定控制、集体智能引言:多无人机系统的协同充分发挥了无人机的优势,提供了更广阔的应用空间。然而,协同过程面临着诸如通信延迟、碰撞避免、任务分配等挑战。稳定控制是协同过程中的一个重要环节,通过合理的控制策略可以实现无人机的安全、高效运行

多无人机协同编队控制研究现状及进展.docx
多无人机协同编队控制研究现状及进展随着无人机技术的快速发展,无人机协同编队控制在军事、民用、科学研究等领域中得到了广泛的应用。随着无人机的数量逐渐增多和应用领域的不断扩大,如何有效地控制无人机编队以达到最优的任务效果成为了当前的研究热点和难点之一。本文将对多无人机协同编队控制研究的现状及进展进行探讨和总结。一、研究现状目前,多无人机协同编队控制主要涉及到无人机的轨迹规划、控制策略的设计、通信与同步问题的解决以及安全保障等方面的研究。1.无人机轨迹规划无人机轨迹规划是多无人机协同编队控制中最为关键的技术之一

多无人机编队协同控制与目标跟踪算法研究.docx
多无人机编队协同控制与目标跟踪算法研究多无人机编队协同控制与目标跟踪算法研究摘要:随着无人机技术的快速发展,多无人机编队协同控制与目标跟踪算法成为无人机领域的研究热点。本文综述了目前国内外在多无人机编队协同控制与目标跟踪算法方面的研究成果,并对其中的几个典型算法进行了详细分析。通过对不同算法的比较与评价,总结出各算法的优缺点以及存在的问题和挑战。最后,展望了多无人机编队协同控制与目标跟踪算法未来的发展方向。关键词:无人机、编队控制、目标跟踪、协同控制、算法1.引言近年来,无人机技术取得了长足的发展,应用领
多无人机协同控制方法和装置.pdf
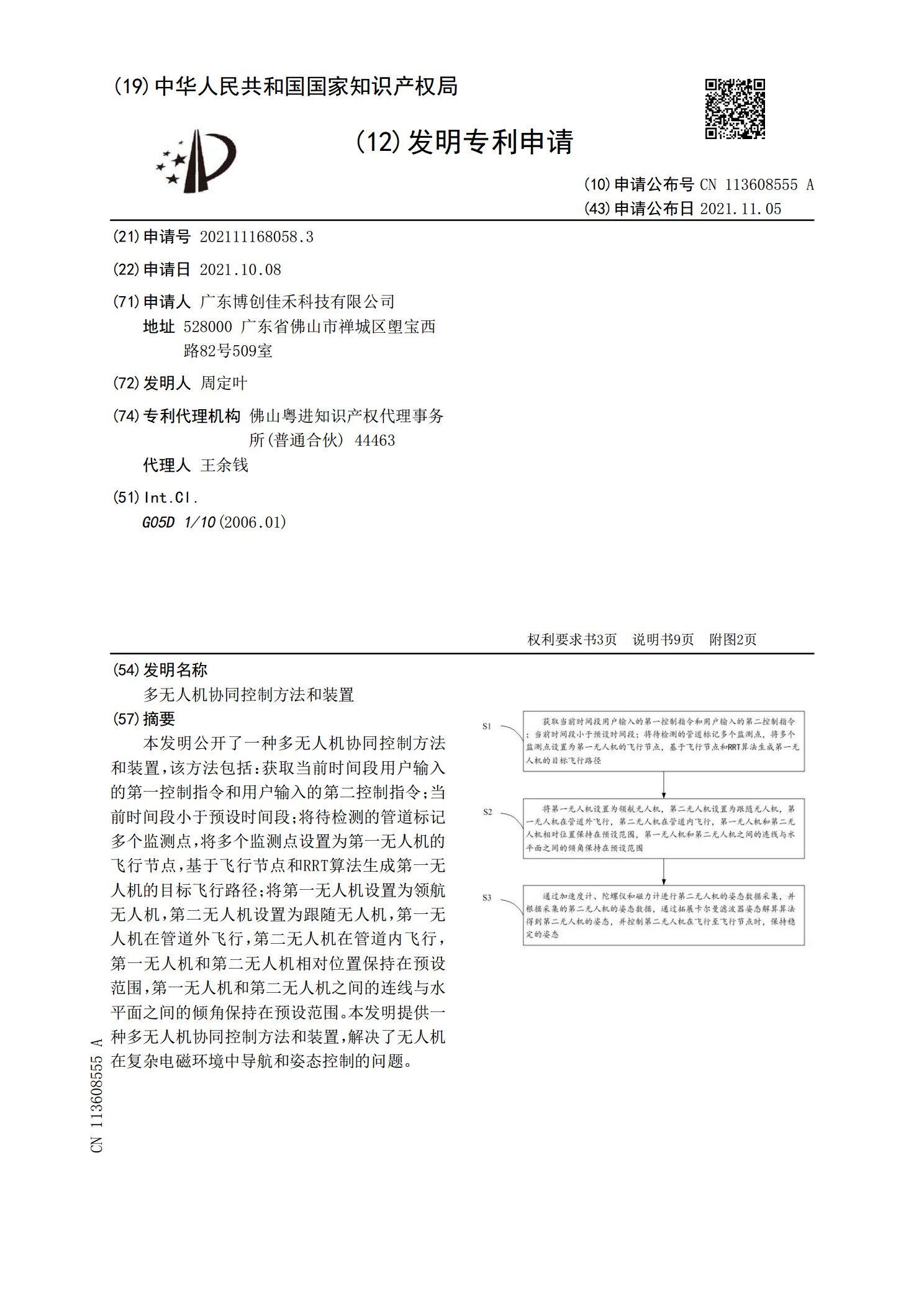
本发明公开了一种多无人机协同控制方法和装置,该方法包括:获取当前时间段用户输入的第一控制指令和用户输入的第二控制指令;当前时间段小于预设时间段;将待检测的管道标记多个监测点,将多个监测点设置为第一无人机的飞行节点,基于飞行节点和RRT算法生成第一无人机的目标飞行路径;将第一无人机设置为领航无人机,第二无人机设置为跟随无人机,第一无人机在管道外飞行,第二无人机在管道内飞行,第一无人机和第二无人机相对位置保持在预设范围,第一无人机和第二无人机之间的连线与水平面之间的倾角保持在预设范围。本发明提供一种多无人机协

对STAP的多无人机协同干扰仿真研究.docx
对STAP的多无人机协同干扰仿真研究随着多无人机系统的应用越来越广泛,其干扰问题也变得越来越突出。其中,多无人机协同干扰是一种最常见的干扰模式之一,它不仅会影响下游系统的性能,还会给无人机系统的整体安全稳定性带来威胁。针对这一问题,STAP成为了一种备受关注的技术手段。本文将对该技术在多无人机协同干扰中的应用进行探讨,并介绍相关的仿真研究。一、STAP技术概述空时自适应处理(STAP)是一种信号处理技术,旨在提高雷达系统对弱目标的探测性能。其基本原理是利用未知干扰的统计特性,对接收机中的信号进行可捕获的干