
基于有限元法的仿生钩形深松铲耕作阻力.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于有限元法的仿生钩形深松铲耕作阻力.docx
基于有限元法的仿生钩形深松铲耕作阻力仿生钩形深松铲耕作阻力的有限元法研究摘要:本文通过有限元法研究了仿生钩形深松铲耕作阻力的特点和影响因素,通过建模和仿真计算得到了不同工况下的耕作阻力,并进行了分析和讨论。研究结果表明,仿生钩形深松铲具有较低的耕作阻力,且其尺寸和工作深度对耕作阻力有一定的影响。该研究对于优化设计和改进钩形深松铲具有一定的参考价值。关键词:仿生钩形深松铲;耕作阻力;有限元法;模型建立;仿真计算1.引言耕作是农业生产的重要环节,合理的耕作方式能够提高土壤的通气性、保水性和肥力,从而为作物生长
一种基于动态仿生原理的深松铲.pdf
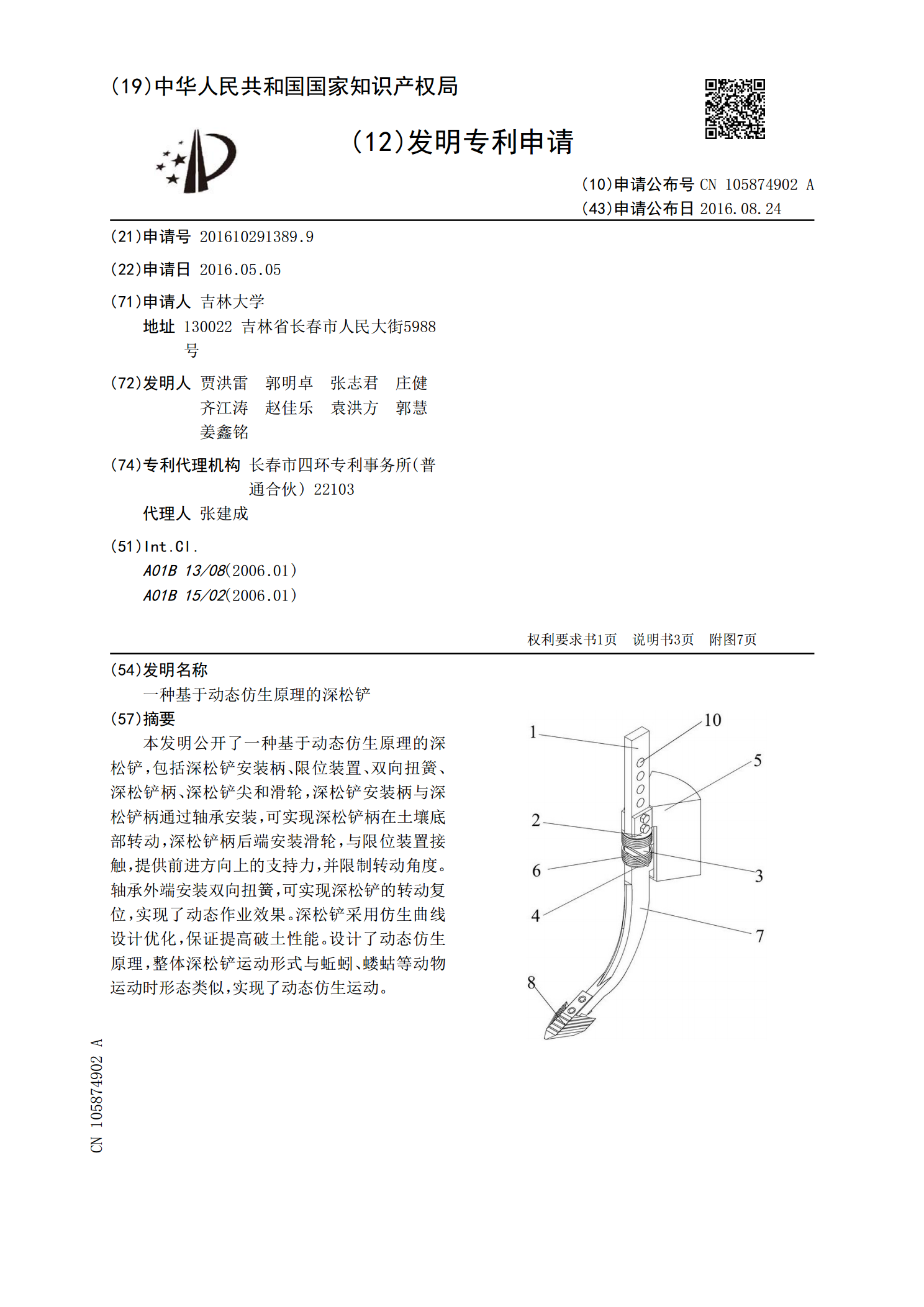
本发明公开了一种基于动态仿生原理的深松铲,包括深松铲安装柄、限位装置、双向扭簧、深松铲柄、深松铲尖和滑轮,深松铲安装柄与深松铲柄通过轴承安装,可实现深松铲柄在土壤底部转动,深松铲柄后端安装滑轮,与限位装置接触,提供前进方向上的支持力,并限制转动角度。轴承外端安装双向扭簧,可实现深松铲的转动复位,实现了动态作业效果。深松铲采用仿生曲线设计优化,保证提高破土性能。设计了动态仿生原理,整体深松铲运动形式与蚯蚓、蝼蛄等动物运动时形态类似,实现了动态仿生运动。

基于神经网络的深松铲作业阻力及功耗的预测模型研究.docx
基于神经网络的深松铲作业阻力及功耗的预测模型研究基于神经网络的深松铲作业阻力及功耗的预测模型研究摘要:随着农业机械化的不断发展,深松铲作业的效率与经济性成为了人们关注的焦点。本文提出了一种基于神经网络的深松铲作业阻力及功耗的预测模型。通过对深松铲作业的主要影响因素进行研究,建立了基于神经网络的模型,并通过实际数据进行验证。实验结果表明,该模型能够有效预测深松铲作业的阻力及功耗,为深松铲作业的优化提供了可靠的依据。关键词:神经网络;深松铲作业;预测模型;阻力;功耗引言深松铲作业是农业生产中常用的一种土壤处理
一种仿生耐磨深松铲刃.pdf
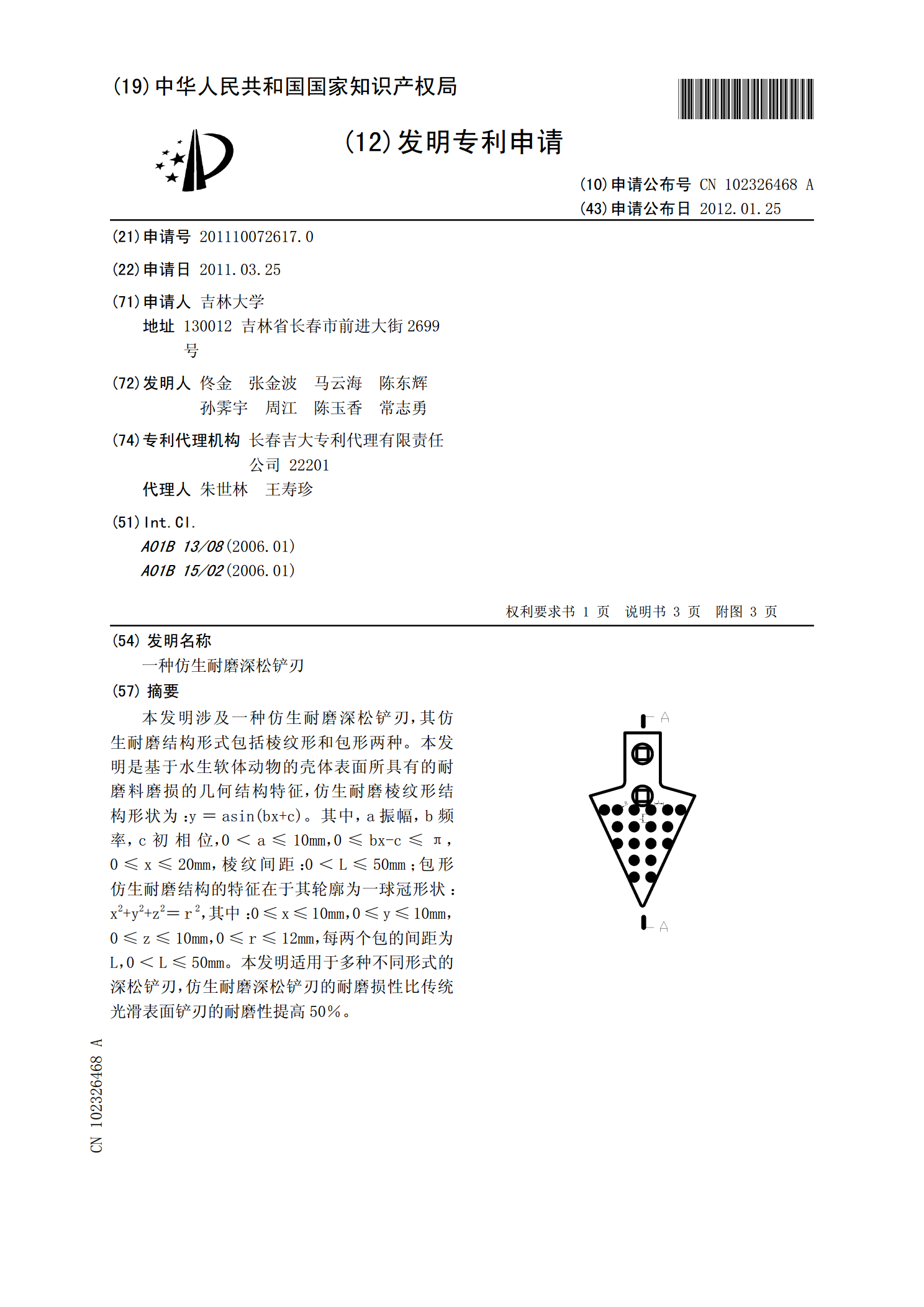
本发明涉及一种仿生耐磨深松铲刃,其仿生耐磨结构形式包括棱纹形和包形两种。本发明是基于水生软体动物的壳体表面所具有的耐磨料磨损的几何结构特征,仿生耐磨棱纹形结构形状为:y=asin(bx+c)。其中,a振幅,b频率,c初相位,0<a≤10mm,0≤bx-c≤π,0≤x≤20mm,棱纹间距:0<L≤50mm;包形仿生耐磨结构的特征在于其轮廓为一球冠形状:x2+y2+z2=r2,其中:0≤x≤10mm,0≤y≤10mm,0≤z≤10mm,0≤r≤12mm,每两个包的间距为L,0<L≤50mm。本发明适用于多种不
一种仿生振动翼深松铲.pdf
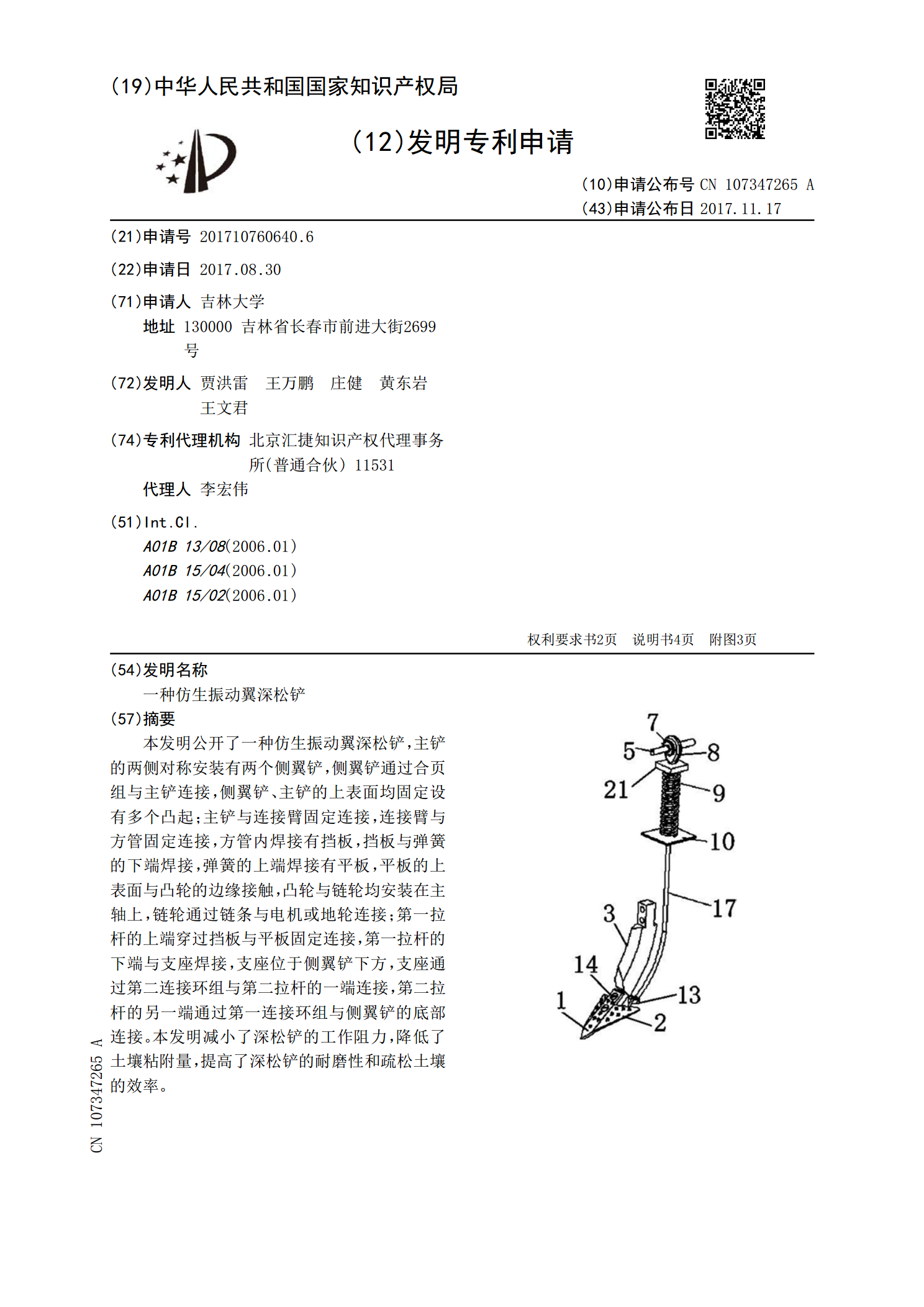
本发明公开了一种仿生振动翼深松铲,主铲的两侧对称安装有两个侧翼铲,侧翼铲通过合页组与主铲连接,侧翼铲、主铲的上表面均固定设有多个凸起;主铲与连接臂固定连接,连接臂与方管固定连接,方管内焊接有挡板,挡板与弹簧的下端焊接,弹簧的上端焊接有平板,平板的上表面与凸轮的边缘接触,凸轮与链轮均安装在主轴上,链轮通过链条与电机或地轮连接;第一拉杆的上端穿过挡板与平板固定连接,第一拉杆的下端与支座焊接,支座位于侧翼铲下方,支座通过第二连接环组与第二拉杆的一端连接,第二拉杆的另一端通过第一连接环组与侧翼铲的底部连接。本发明