
一种基于动态仿生原理的深松铲.pdf

邻家****曼玉

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于动态仿生原理的深松铲.pdf
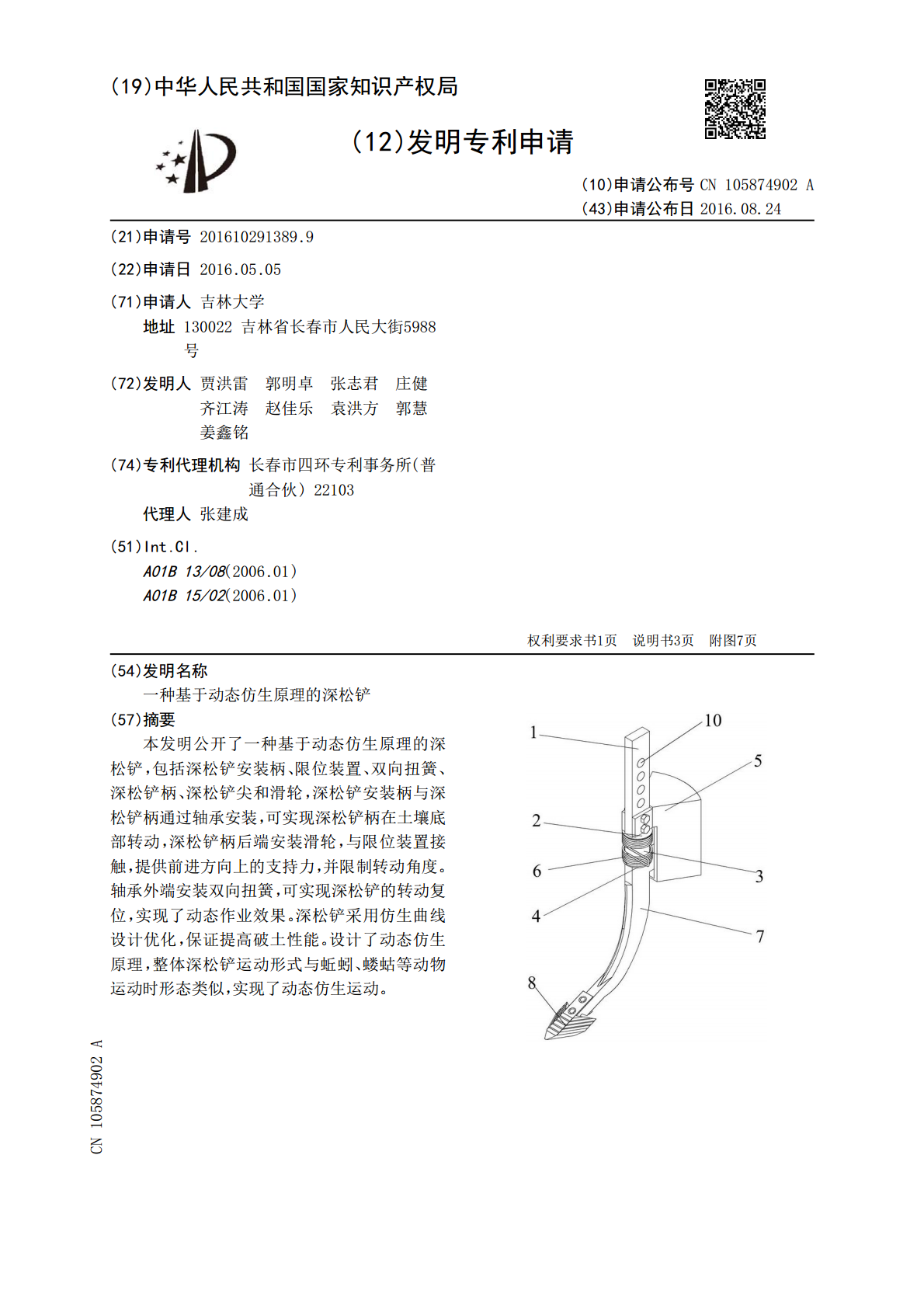
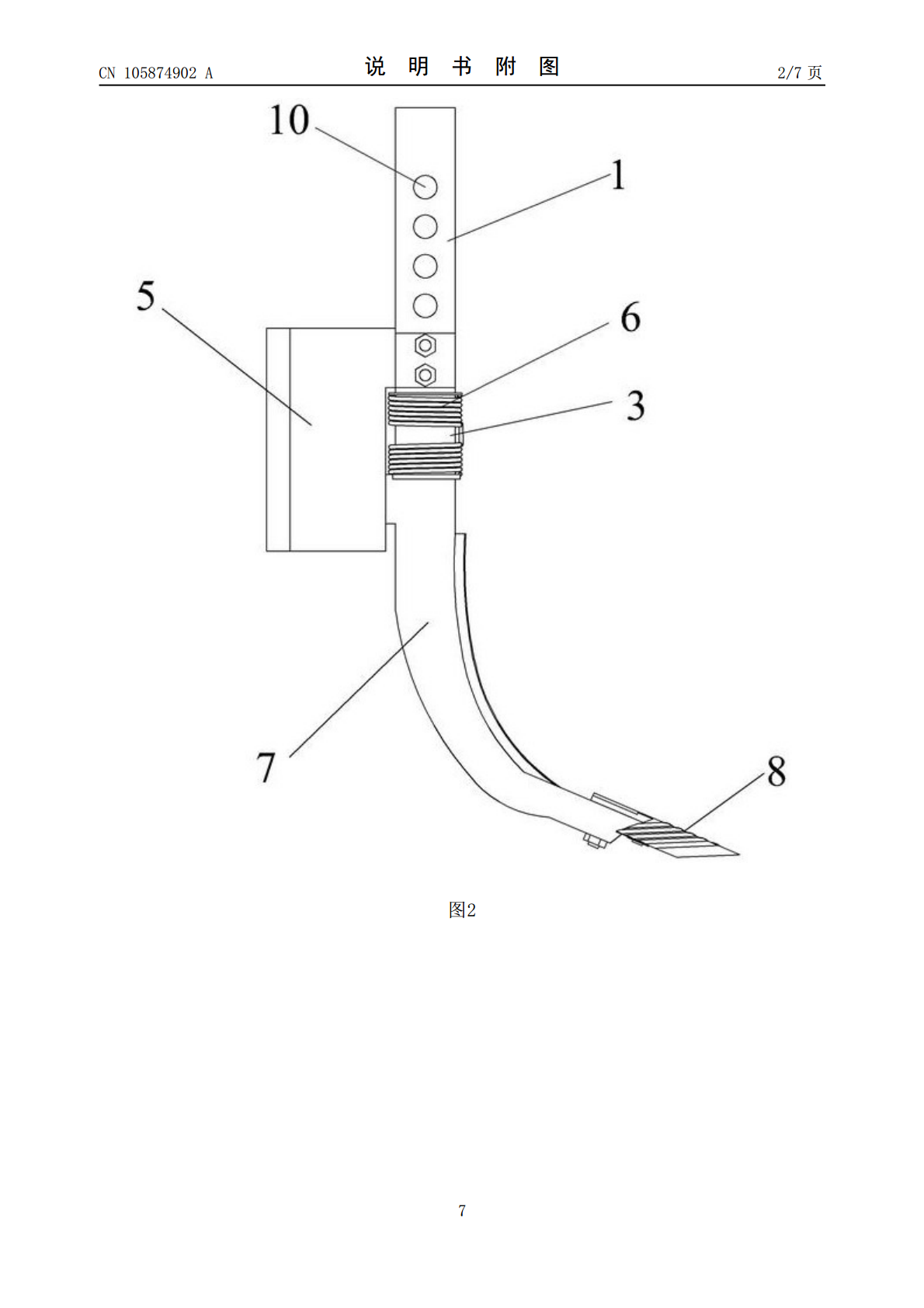
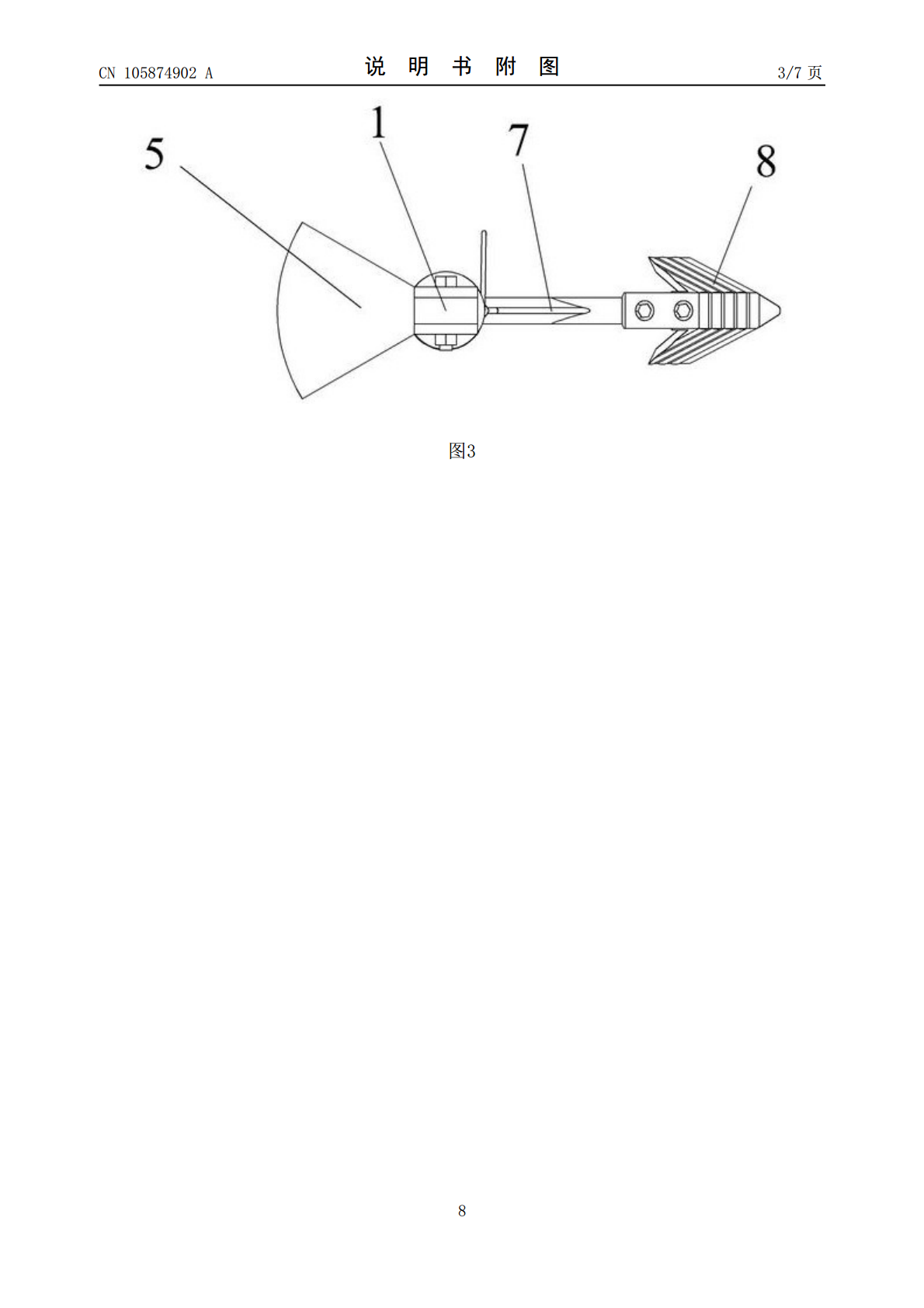
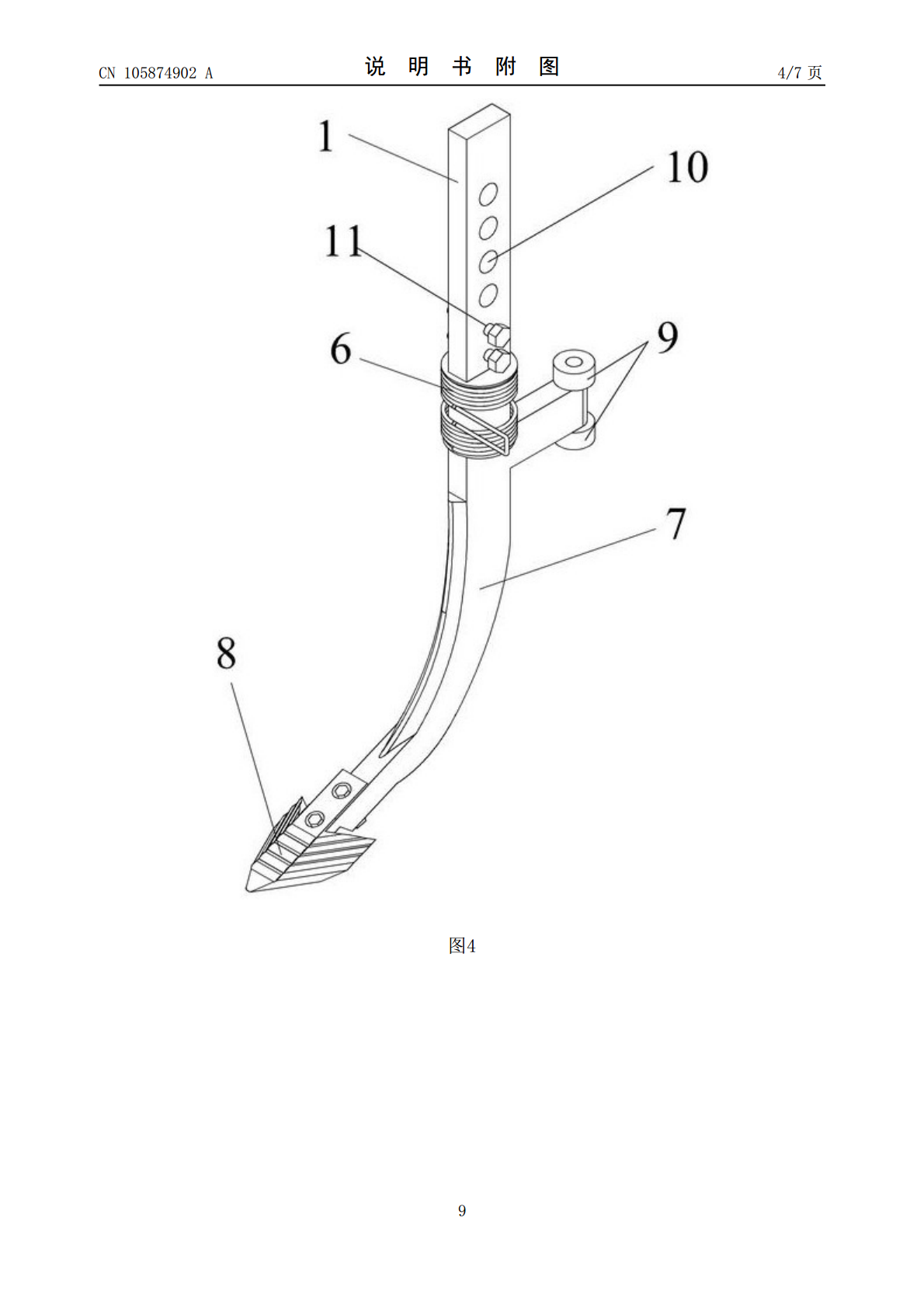
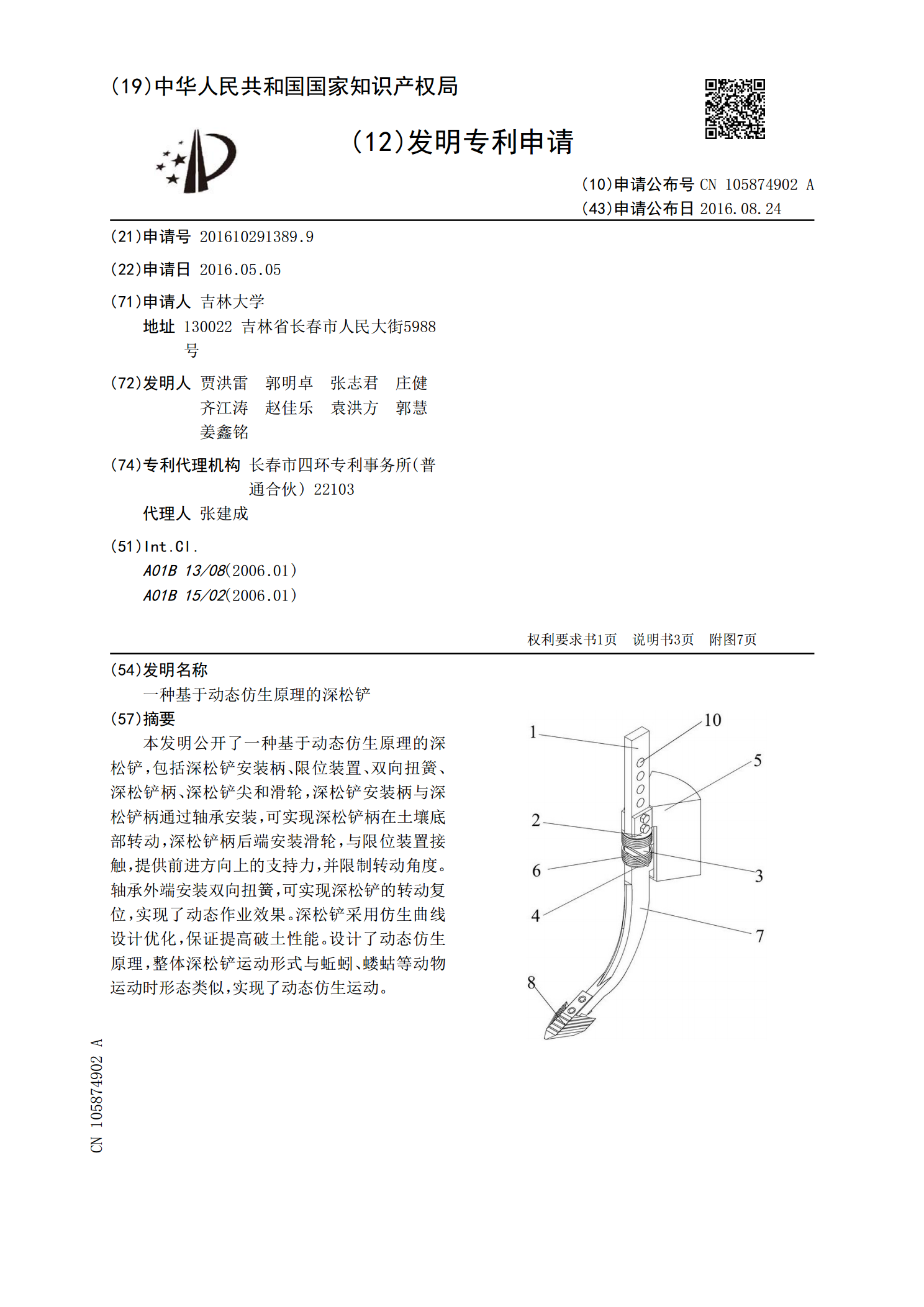
本发明公开了一种基于动态仿生原理的深松铲,包括深松铲安装柄、限位装置、双向扭簧、深松铲柄、深松铲尖和滑轮,深松铲安装柄与深松铲柄通过轴承安装,可实现深松铲柄在土壤底部转动,深松铲柄后端安装滑轮,与限位装置接触,提供前进方向上的支持力,并限制转动角度。轴承外端安装双向扭簧,可实现深松铲的转动复位,实现了动态作业效果。深松铲采用仿生曲线设计优化,保证提高破土性能。设计了动态仿生原理,整体深松铲运动形式与蚯蚓、蝼蛄等动物运动时形态类似,实现了动态仿生运动。
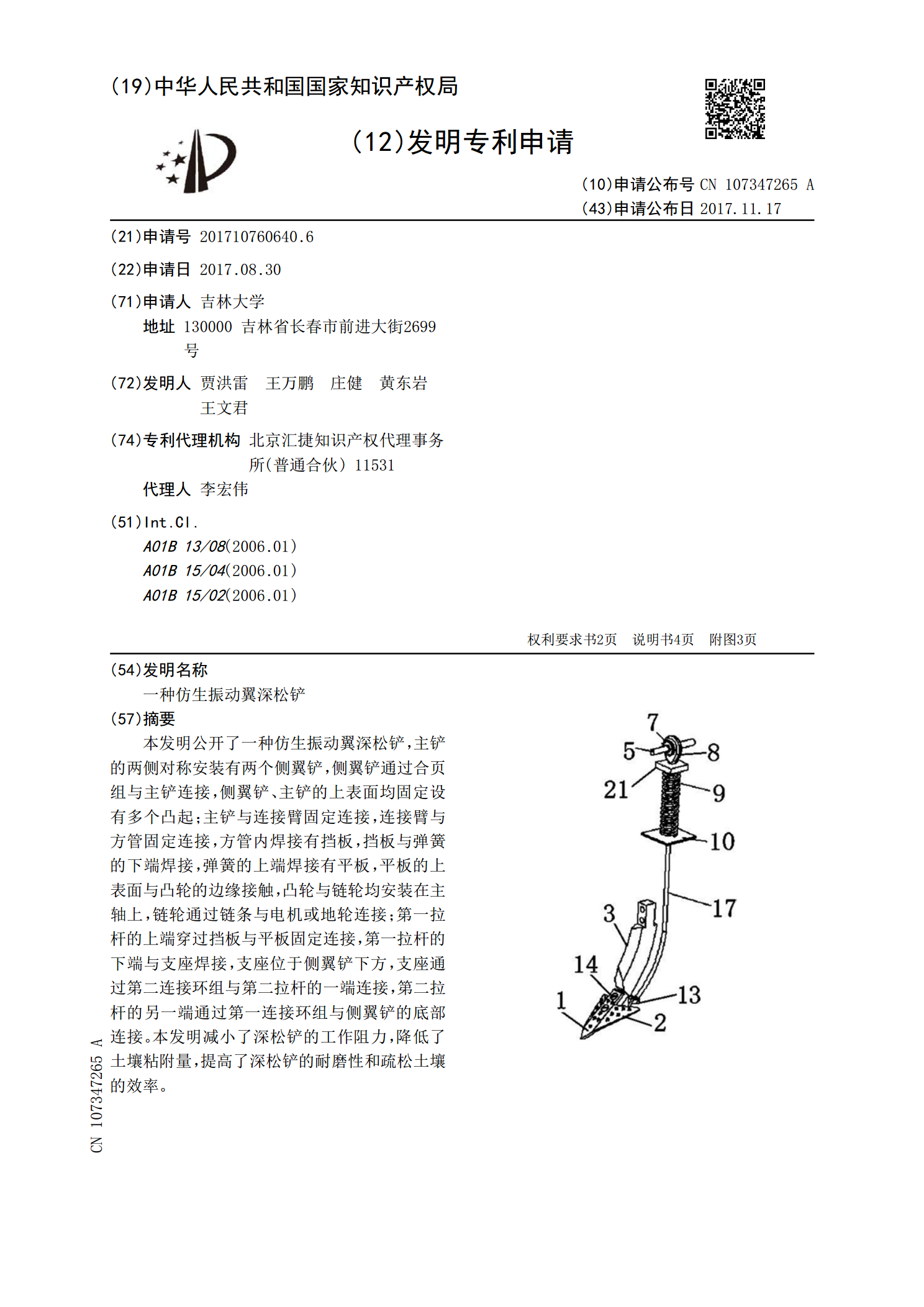
一种仿生振动翼深松铲.pdf
本发明公开了一种仿生振动翼深松铲,主铲的两侧对称安装有两个侧翼铲,侧翼铲通过合页组与主铲连接,侧翼铲、主铲的上表面均固定设有多个凸起;主铲与连接臂固定连接,连接臂与方管固定连接,方管内焊接有挡板,挡板与弹簧的下端焊接,弹簧的上端焊接有平板,平板的上表面与凸轮的边缘接触,凸轮与链轮均安装在主轴上,链轮通过链条与电机或地轮连接;第一拉杆的上端穿过挡板与平板固定连接,第一拉杆的下端与支座焊接,支座位于侧翼铲下方,支座通过第二连接环组与第二拉杆的一端连接,第二拉杆的另一端通过第一连接环组与侧翼铲的底部连接。本发明
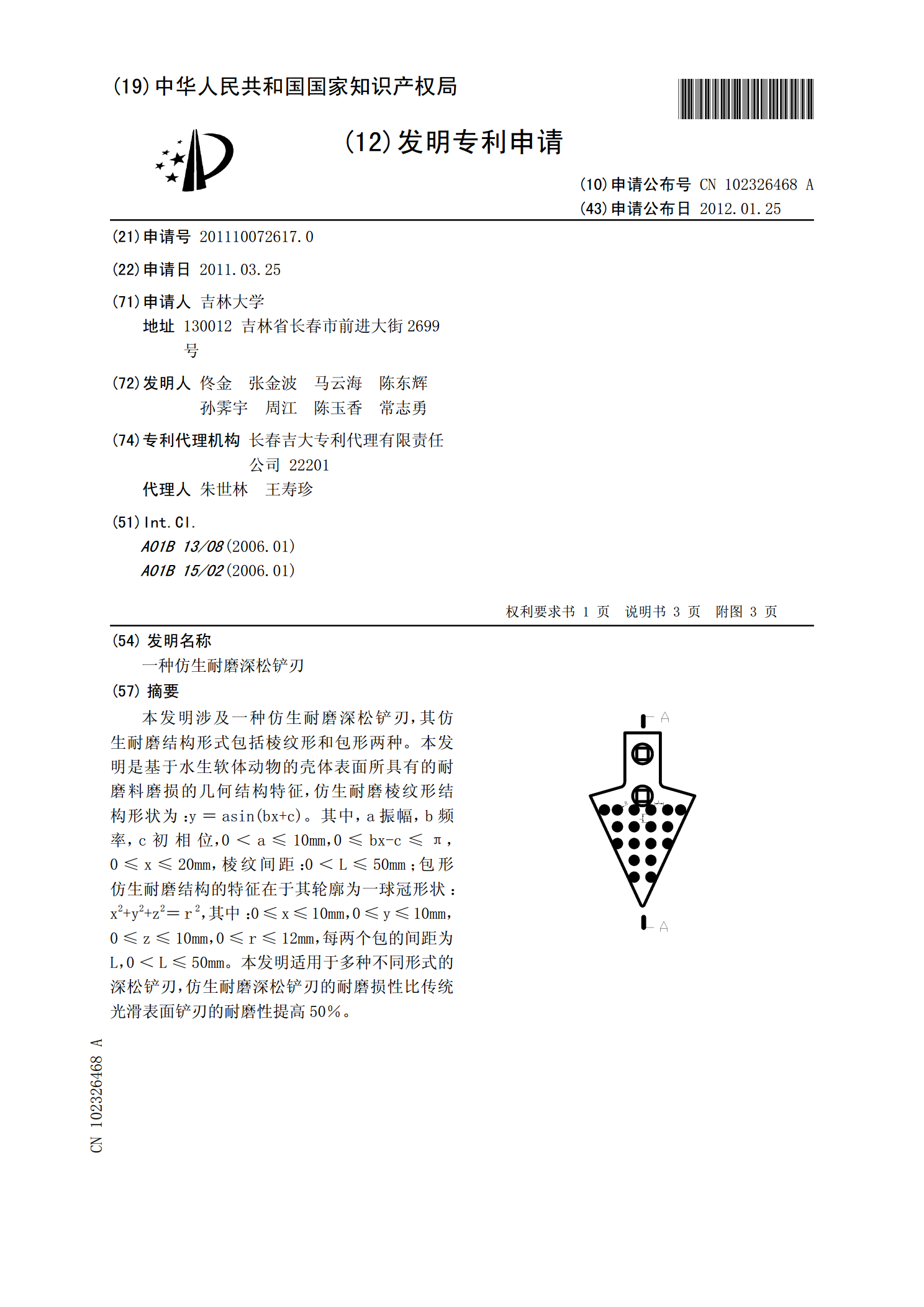
一种仿生耐磨深松铲刃.pdf
本发明涉及一种仿生耐磨深松铲刃,其仿生耐磨结构形式包括棱纹形和包形两种。本发明是基于水生软体动物的壳体表面所具有的耐磨料磨损的几何结构特征,仿生耐磨棱纹形结构形状为:y=asin(bx+c)。其中,a振幅,b频率,c初相位,0<a≤10mm,0≤bx-c≤π,0≤x≤20mm,棱纹间距:0<L≤50mm;包形仿生耐磨结构的特征在于其轮廓为一球冠形状:x2+y2+z2=r2,其中:0≤x≤10mm,0≤y≤10mm,0≤z≤10mm,0≤r≤12mm,每两个包的间距为L,0<L≤50mm。本发明适用于多种不
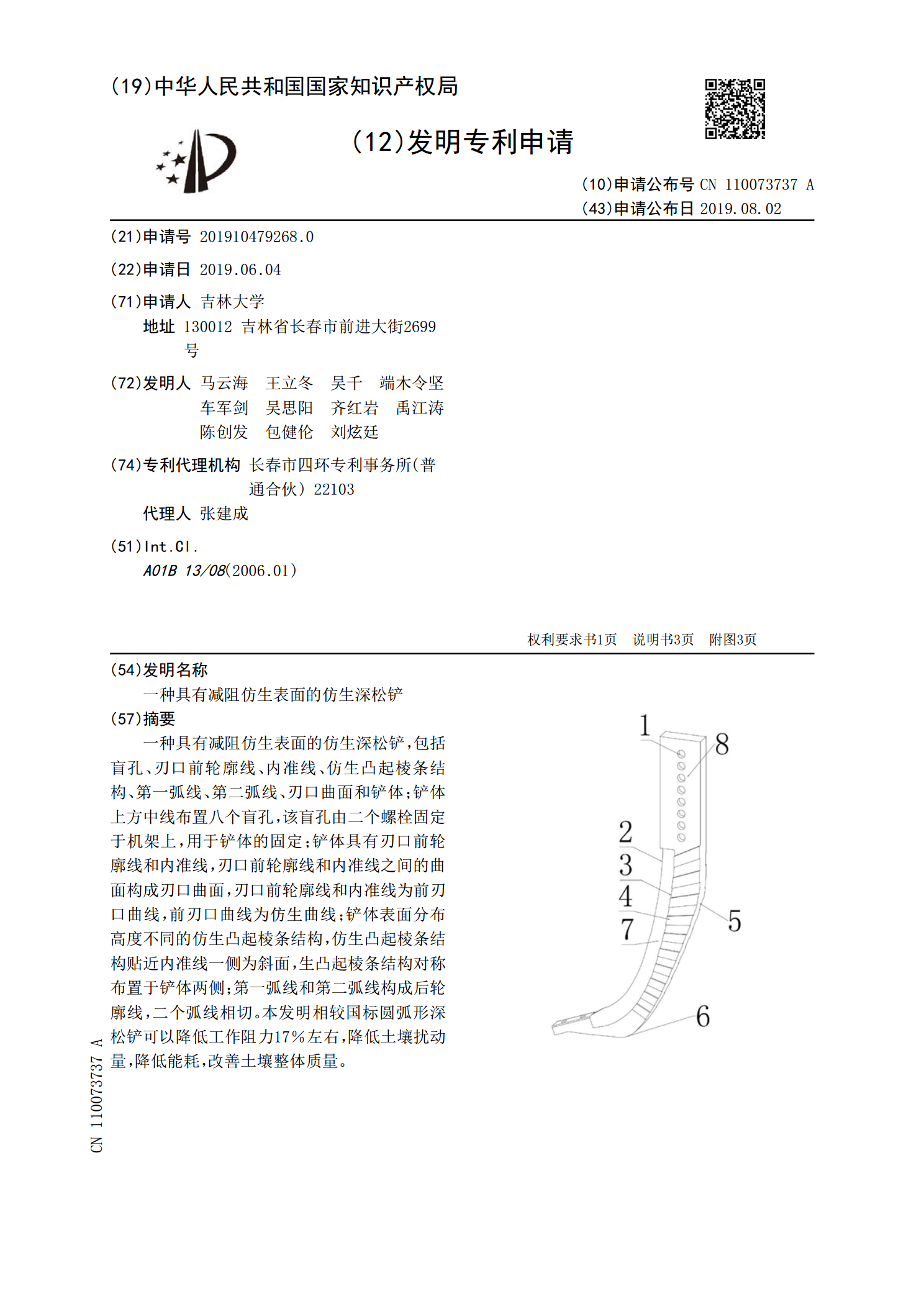
一种具有减阻仿生表面的仿生深松铲.pdf
一种具有减阻仿生表面的仿生深松铲,包括盲孔、刃口前轮廓线、内准线、仿生凸起棱条结构、第一弧线、第二弧线、刃口曲面和铲体;铲体上方中线布置八个盲孔,该盲孔由二个螺栓固定于机架上,用于铲体的固定;铲体具有刃口前轮廓线和内准线,刃口前轮廓线和内准线之间的曲面构成刃口曲面,刃口前轮廓线和内准线为前刃口曲线,前刃口曲线为仿生曲线;铲体表面分布高度不同的仿生凸起棱条结构,仿生凸起棱条结构贴近内准线一侧为斜面,生凸起棱条结构对称布置于铲体两侧;第一弧线和第二弧线构成后轮廓线,二个弧线相切。本发明相较国标圆弧形深松铲可以
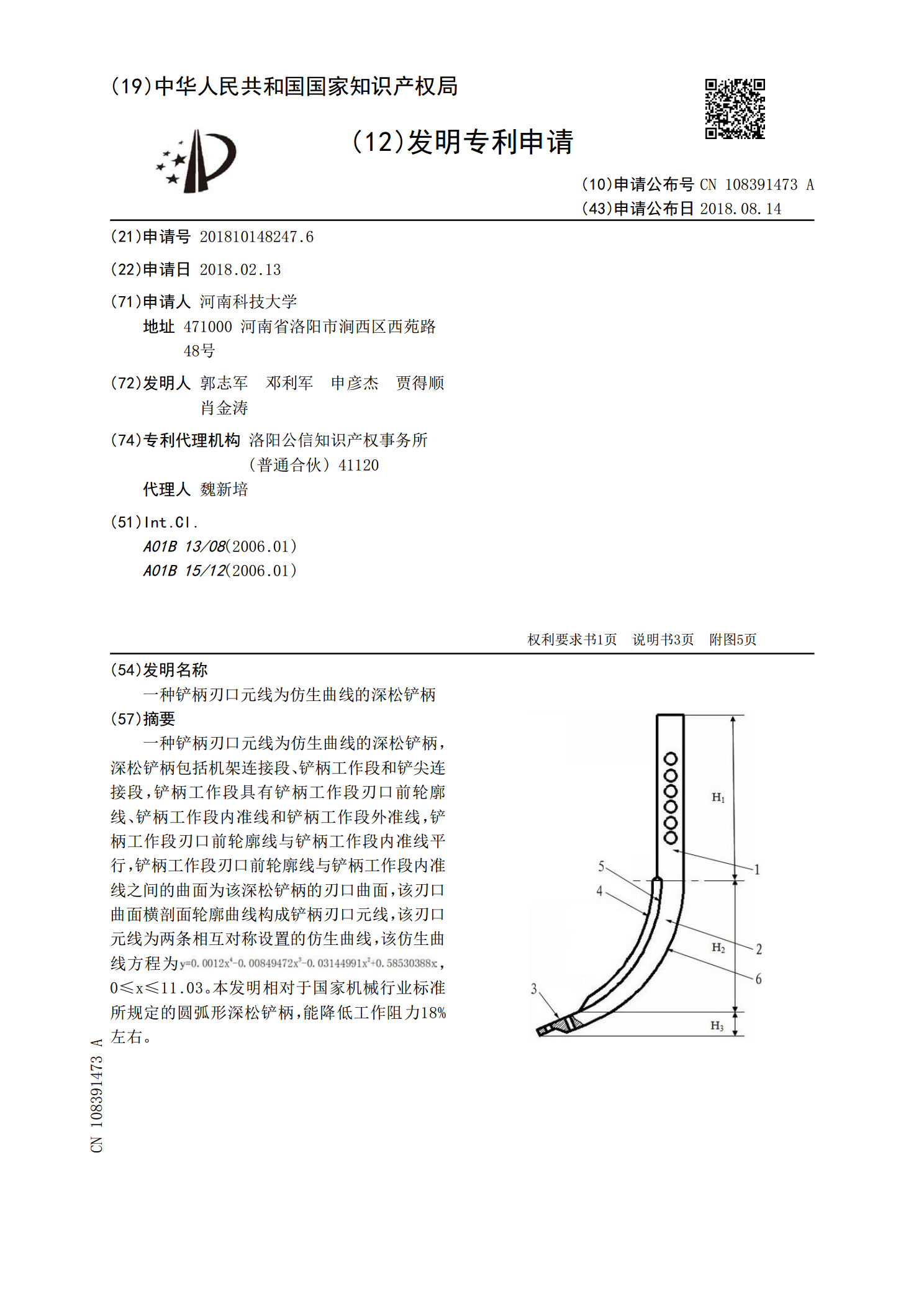
一种铲柄刃口元线为仿生曲线的深松铲柄.pdf
一种铲柄刃口元线为仿生曲线的深松铲柄,深松铲柄包括机架连接段、铲柄工作段和铲尖连接段,铲柄工作段具有铲柄工作段刃口前轮廓线、铲柄工作段内准线和铲柄工作段外准线,铲柄工作段刃口前轮廓线与铲柄工作段内准线平行,铲柄工作段刃口前轮廓线与铲柄工作段内准线之间的曲面为该深松铲柄的刃口曲面,该刃口曲面横剖面轮廓曲线构成铲柄刃口元线,该刃口元线为两条相互对称设置的仿生曲线,该仿生曲线方程为