
PID控制原理ppt课件.ppt

ca****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

PID控制原理ppt课件.ppt
第4章PID控制原理4.lPID控制的特点PID常规PID控制系统的原理输入:控制偏差e(t)=r(t)-y(t)输出:偏差的比例(P)、积分(I)和微分(D)的线性组合PID控制具有以下优点:在过程控制中,绝大部分都采用PID控制。例外的情况有两种。4.2比例调节(P调节)4.2.1比例控制的调节规律和比例带在实际应用中,由于执行器的运动(如阀门开度)有限,控制器的输出u(t)也就被限制在一定的范围之内,换句话说,在Kc较大时,偏差e(t)仅在一定的范围内与控制器的输出保持线性关系。图4-1说明了偏差与

PID控制原理ppt课件.ppt
在此输入文字标题Thanks!

自控原理PID控制器PPT课件.ppt
自动控制原理

PID调节原理ppt课件.ppt
PID调节原理PID调节器是一种线性控制器,它根据给定值r(t)与实际输出值c(t)构成系统的误差,利用比例、积分、微分计算出控制量进行控制:e(t)=r(t)−c(t)PID调节器由比例单元(P)、积分单元(I)和微分单元(D)组成。其输入e(t)与输出u(t)的关系为u(t)=kp(e(t)+1/TI∫e(t)dt+TD*de(t)/dt)式中积分的上下限分别是0和t因此它的传递函数为:G(s)=U(s)/E(s)=kp(1+1/(TI*s)+TD*s)其中kp为比例系数;TI为积分时间常数;TD为微
pid控制PPT课件.ppt
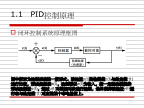
1.1PID控制原理模拟PID控制系统原理框图.1.1PID控制原理.1.1PID控制原理.1.1PID控制原理.1.1PID控制原理1.2数字PID控制1.2.1位置式PID控制算法1.2.2增量式PID控制算法如果控制系统采用恒定的采样周期T,只要使用前后三次采样得到的偏差值,就可以求出控制量的增量增量式PID控制算法与位置式PID算法相比,计算量小的多,因此在实际中得到广泛的应用。位置式PID控制算法也可以通过增量式控制算法推出递推计算公式:上式就是目前在计算机控制中广泛应用的数字递推PID控制算法