
基于光谱匹配滤波的线结构光扫描人脸轮廓三维成像系统.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于光谱匹配滤波的线结构光扫描人脸轮廓三维成像系统.docx
基于光谱匹配滤波的线结构光扫描人脸轮廓三维成像系统基于光谱匹配滤波的线结构光扫描人脸轮廓三维成像系统摘要:随着人脸识别技术的发展,越来越多的应用场景需要获取精准、高质量的人脸轮廓三维成像。本文提出了一种基于光谱匹配滤波的线结构光扫描人脸轮廓三维成像系统。该系统结合线结构光投射和光谱匹配滤波技术,能够实现高精度的人脸轮廓三维成像。在硬件方面,系统由光源、相机、线结构光投射器和滤光片组成;在算法方面,系统采用光谱匹配滤波算法对扫描得到的图像进行处理,提取出准确的人脸轮廓。实验证明,该系统能够实现准确、快速、高

线结构光三维轮廓测量系统的标定方法.docx
线结构光三维轮廓测量系统的标定方法摘要:随着工业制造的不断发展,三维轮廓测量技术变得越来越重要。线结构光三维轮廓测量系统是一种常见的测量技术,它能够在较短的时间内获取高精度的三维点云数据。然而,在使用线结构光三维轮廓测量系统时,必须要进行标定,以确保测量结果的准确性。本文将介绍线结构光三维轮廓测量系统的标定方法,包括仪器标定和物体标定。Introduction:三维轮廓测量技术被广泛应用于工业制造、数字医疗、电子游戏和虚拟现实中。线结构光三维轮廓测量系统是一种常见的三维测量技术。该技术通过将一个照相机和一

基于线激光扫描的物体三维轮廓测量系统.pdf
本发明公开一种基于线激光扫描的物体三维轮廓测量系统,包括线激光器(1)、左右图像传感器(2、3)、精密转台(4)、标定板(5)、L型标定辅助板(6)和计算机(7),计算机(7)分别与左图像传感器(2)、右图像传感器(3)和精密转台(4)相连;左右图像传感器(2、3)对称置于线激光器(1)的两侧,并与线激光器(1)成一直线,激光平面与该直线垂直,正对于精密转台(4)的侧面投射,精密转台(4)的转轴与线激光重合,图像传感器(2、3)均朝向被测物体。本发明物体三维轮廓测量系统,数据传输稳定、成本低、成像误差小。
基于线激光扫描的齿轮三维轮廓测量系统及方法.pdf
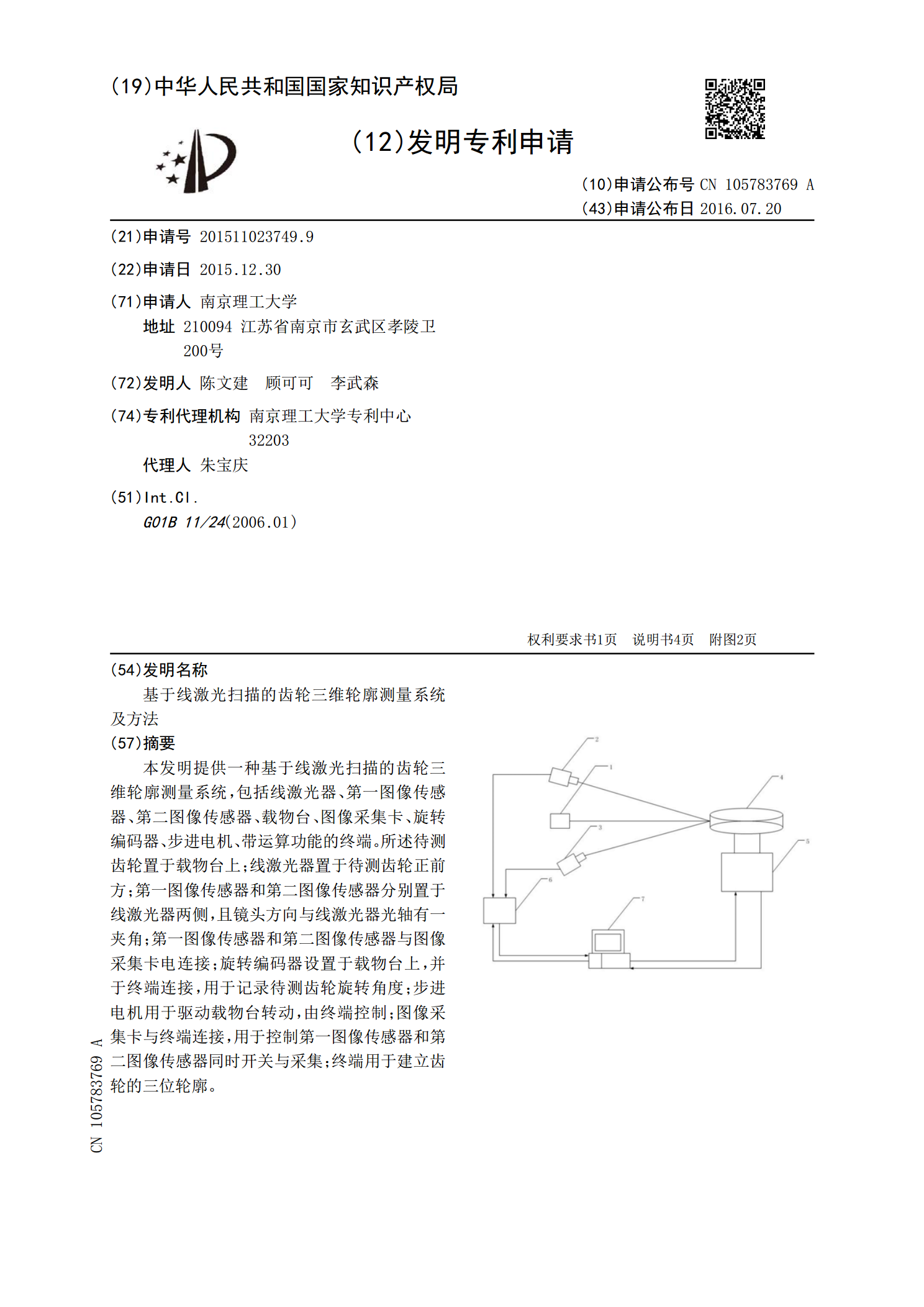
本发明提供一种基于线激光扫描的齿轮三维轮廓测量系统,包括线激光器、第一图像传感器、第二图像传感器、载物台、图像采集卡、旋转编码器、步进电机、带运算功能的终端。所述待测齿轮置于载物台上;线激光器置于待测齿轮正前方;第一图像传感器和第二图像传感器分别置于线激光器两侧,且镜头方向与线激光器光轴有一夹角;第一图像传感器和第二图像传感器与图像采集卡电连接;旋转编码器设置于载物台上,并于终端连接,用于记录待测齿轮旋转角度;步进电机用于驱动载物台转动,由终端控制;图像采集卡与终端连接,用于控制第一图像传感器和第二图像传

基于线激光扫描的全角度三维成像系统.docx
基于线激光扫描的全角度三维成像系统摘要随着现代制造业和工业生产技术的发展,对于实现三维成像和测量技术的需求越来越迫切。本文介绍了一种基于线激光扫描的全角度三维成像系统,该系统采用了激光三维成像技术和多线激光扫描技术,能够实现在短时间内对物体表面的三维成像,具有高精度、高效率、高精度的特点。本文重点介绍了该系统的工作原理,包括激光三维成像技术、多线激光扫描技术、数据处理算法等方面,并对该系统的未来发展和应用前景进行了简要展望。关键词:全角度三维成像系统;线激光扫描;激光三维成像技术;多线激光扫描技术;数据处