
基于多轴伺服驱动系统的FPGA接口电路设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多轴伺服驱动系统的FPGA接口电路设计.docx
基于多轴伺服驱动系统的FPGA接口电路设计基于多轴伺服驱动系统的FPGA接口电路设计摘要:多轴伺服驱动系统在工业自动化领域中起着重要作用。为了实现高效的运动控制和精确的位置控制,设计了一种基于FPGA的接口电路。该接口电路可以实现对多个伺服驱动器的控制和监测,并提供高速的数据传输速率和精确的时序控制。本文详细介绍了该接口电路的设计原理、硬件架构和软件实现,并进行了相应的实验验证。实验结果显示,该接口电路可以有效地控制多轴伺服驱动系统,并实现高精度的位置控制。关键词:多轴伺服驱动系统,FPGA,接口电路,运

基于FPGA的多DSP系统接口电路设计.docx
基于FPGA的多DSP系统接口电路设计随着计算机技术、电子设备和数码信号处理技术的不断发展,数字信号处理技术已成为现代通信、娱乐和医疗设备中不可或缺的组成部分。在数字信号处理应用中,常常需要采用一些专门的处理器,比如数字信号处理器(DSP)。一个数字信号处理器的处理能力往往是通过增加处理器的数量和/或增加处理器的时钟频率来实现的。然而,这种简单的CPU多核化或提高时钟频率的方法会导致功耗和散热问题,因此,存在寻找更好的方法来实现高性能数码信号处理的需求。在数字信号处理领域中,Field-Programma

基于FPGA的交流伺服驱动系统的设计与实现.docx
基于FPGA的交流伺服驱动系统的设计与实现摘要:交流伺服驱动是现代控制系统中重要的部分之一,它为各种精密控制应用提供了高效而稳定的控制方法。本文提出了基于FPGA的交流伺服驱动系统的设计与实现,通过对交流伺服驱动的原理和FPGA技术的研究,成功实现了高效的伺服控制系统。本文首先介绍了交流伺服驱动的原理和常见方法,并分析了传统的驱动系统在实际应用中所遇到的问题。接着,提出了使用FPGA技术实现伺服控制的优势,包括高可靠性、高灵活性、高速度和低功耗等方面。在此基础上,本文设计了基于FPGA的伺服驱动系统,包括
具有电源监测功能的多轴伺服驱动系统.pdf
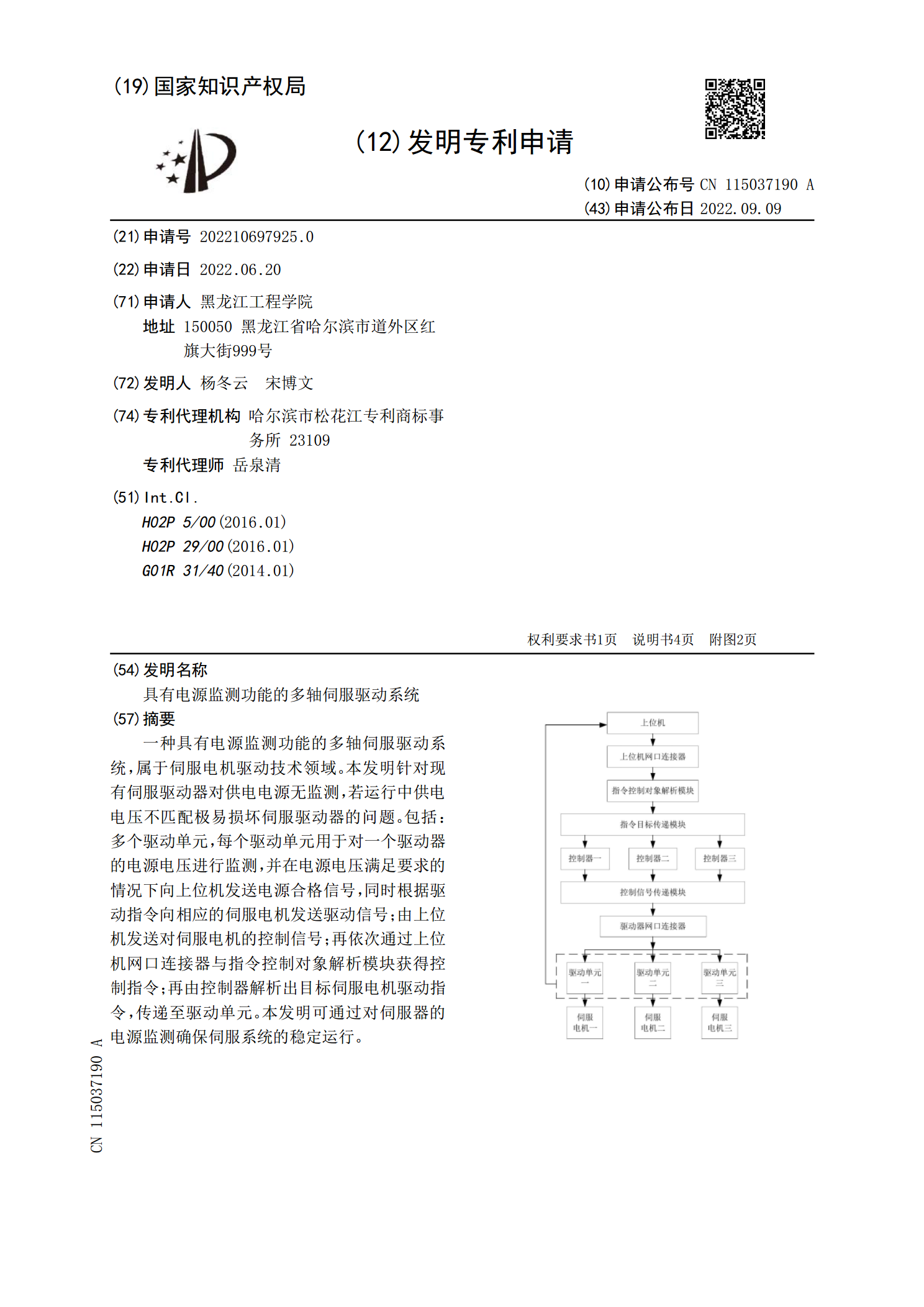
一种具有电源监测功能的多轴伺服驱动系统,属于伺服电机驱动技术领域。本发明针对现有伺服驱动器对供电电源无监测,若运行中供电电压不匹配极易损坏伺服驱动器的问题。包括:多个驱动单元,每个驱动单元用于对一个驱动器的电源电压进行监测,并在电源电压满足要求的情况下向上位机发送电源合格信号,同时根据驱动指令向相应的伺服电机发送驱动信号;由上位机发送对伺服电机的控制信号;再依次通过上位机网口连接器与指令控制对象解析模块获得控制指令;再由控制器解析出目标伺服电机驱动指令,传递至驱动单元。本发明可通过对伺服器的电源监测确保伺

基于FPGA的多轴联动专用控制电路设计.docx
基于FPGA的多轴联动专用控制电路设计摘要:本文针对工业机器人控制中多轴联动问题,设计了一种基于FPGA的专用控制电路。该电路通过实时监测多个轴的运动状态和位置信息,实现了多轴联动控制,提高了工业机器人的精准度和运行效率。本设计采用FPGA芯片,具有高可编程性、可重构性等特点,为工业机器人控制提供了可靠的解决方案。关键词:FPGA、多轴联动、专用控制电路、实时监测、精准度、运行效率一、引言随着工业机器人的广泛应用,多轴联动已成为工业机器人控制中的重要问题。多轴联动控制是指通过让多个轴之间精确运动和互相协作