
双凸轮控制吹瓶机取送瓶机械手的改进设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

双凸轮控制吹瓶机取送瓶机械手的改进设计.docx
双凸轮控制吹瓶机取送瓶机械手的改进设计双凸轮控制吹瓶机取送瓶机械手的改进设计摘要:本文针对吹瓶机取送瓶机械手的双凸轮控制系统进行了改进设计,旨在提高机械手的运动精度和稳定性。通过分析传统双凸轮控制系统的不足之处,本文提出了一种基于先进控制算法的改进方案。该方案利用PID控制算法和模糊控制算法对机械手进行精确控制,在保证取送瓶过程的稳定性的同时,提高了机械手的运动精度。实验结果表明,改进后的系统具有更好的性能和运动控制效果。关键词:双凸轮控制系统;吹瓶机;取送瓶机械手;改进设计;PID控制算法;模糊控制算法

吹瓶机取送瓶凸轮系统的参数化设计的开题报告.docx
吹瓶机取送瓶凸轮系统的参数化设计的开题报告标题:吹瓶机取送瓶凸轮系统的参数化设计开题报告一、研究背景与意义在现代制造行业中,各种设备和机械的研究和开发一直是推动工业技术进步的核心要素之一。吹瓶机是一种常见的塑料制品制造设备,主要用于生产PET瓶等塑料制品。在吹瓶机的操作过程中,取瓶和送瓶的准确与稳定是非常重要的环节,取送瓶凸轮系统作为吹瓶机的核心机械部件,对于生产效率和产品质量具有重要影响。因此,研究和设计一套参数化的取送瓶凸轮系统,是提高吹瓶机生产效率和塑料制品质量的必要手段。二、研究目的和方法目的:本

PET吹瓶机机械手凸轮的设计研究.docx
PET吹瓶机机械手凸轮的设计研究PET吹瓶机是目前市场上广泛使用的瓶子生产设备之一,机械手凸轮是PET吹瓶机的一个重要部件。本文旨在探究PET吹瓶机机械手凸轮的设计研究。首先,我们来了解什么是PET吹瓶机以及其生产过程。PET吹瓶机是一种塑料瓶生产设备,可以制造各种形状的瓶子,广泛应用于食品、饮料、化妆品等行业。其生产过程主要包括液体PET预热、拉伸、吹气成型、冷却等步骤。其中,机械手凸轮的作用是在生产过程中协调各个步骤的顺序和速度,使产品生产达到最佳效果。机械手凸轮的设计可以分为以下几个方面:一、机械结

全自动旋转式吹瓶机凸轮取送系统稳定性设计研究的任务书.docx
全自动旋转式吹瓶机凸轮取送系统稳定性设计研究的任务书任务书项目标题:全自动旋转式吹瓶机凸轮取送系统稳定性设计研究项目背景:近年来,塑料瓶在各个领域的应用越来越广泛,如饮料、食品、药品等行业都需使用到塑料瓶。而在塑料瓶的生产过程中,吹瓶机的使用成为了不可或缺的一个环节。传统吹瓶机的生产效率低、劳动强度大、产生废品率高等问题已经逐渐被解决,全自动吹瓶机因其高效、自动化、低废品率等特点已经被广泛应用。目前,市面上的全自动吹瓶机凸轮取送系统虽然稳定性较好,但在生产过程中还存在一些问题,如凸轮摆动过大、轴向运动不稳
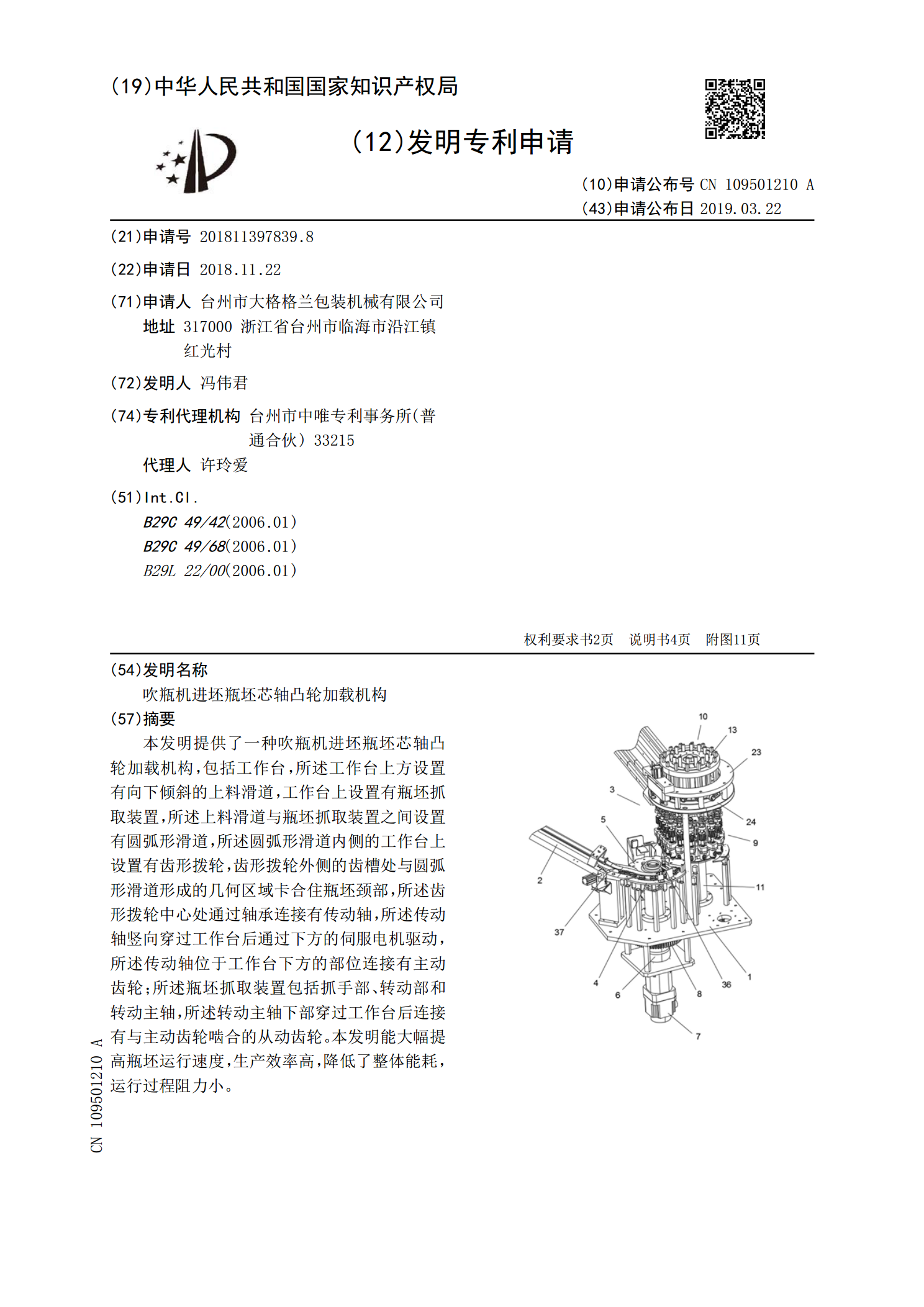
吹瓶机进坯瓶坯芯轴凸轮加载机构.pdf
本发明提供了一种吹瓶机进坯瓶坯芯轴凸轮加载机构,包括工作台,所述工作台上方设置有向下倾斜的上料滑道,工作台上设置有瓶坯抓取装置,所述上料滑道与瓶坯抓取装置之间设置有圆弧形滑道,所述圆弧形滑道内侧的工作台上设置有齿形拨轮,齿形拨轮外侧的齿槽处与圆弧形滑道形成的几何区域卡合住瓶坯颈部,所述齿形拨轮中心处通过轴承连接有传动轴,所述传动轴竖向穿过工作台后通过下方的伺服电机驱动,所述传动轴位于工作台下方的部位连接有主动齿轮;所述瓶坯抓取装置包括抓手部、转动部和转动主轴,所述转动主轴下部穿过工作台后连接有与主动齿轮啮