
飞行机器人架空电力线路巡检视频评价挖掘系统的设计与实现.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

飞行机器人架空电力线路巡检视频评价挖掘系统的设计与实现.pptx
,目录PartOnePartTwo背景介绍系统目标关键技术PartThree飞行机器人设计视频采集模块设计视频处理模块设计数据库设计PartFour飞行机器人控制实现视频采集与处理实现数据库操作实现系统界面实现PartFive测试环境与测试方法测试结果与分析系统性能评估存在问题与改进方向PartSix研究成果总结未来工作展望THANKS

飞行机器人架空电力线路巡检视频评价挖掘系统的设计与实现.docx
飞行机器人架空电力线路巡检视频评价挖掘系统的设计与实现随着现代社会信息化和智能化的日益增强,机器人技术在各个领域取得了广泛的应用,其中飞行机器人的应用越来越广泛。飞行机器人架空电力线路巡检视频评价挖掘系统的设计与实现就是其中的一个应用。飞行机器人架空电力线路巡检视频评价挖掘系统的设计与实现的核心是通过分析巡检过程中的视频数据来评估巡检过程的质量和效果。它不仅能够提高巡检效率,降低巡检成本,还能够提高安全性,减少事故的发生。本文就从系统的设计、实现和运行三个方面来进行探讨。一、系统设计(1)数据采集数据采集
架空电力线路巡检爬塔机器人.pdf
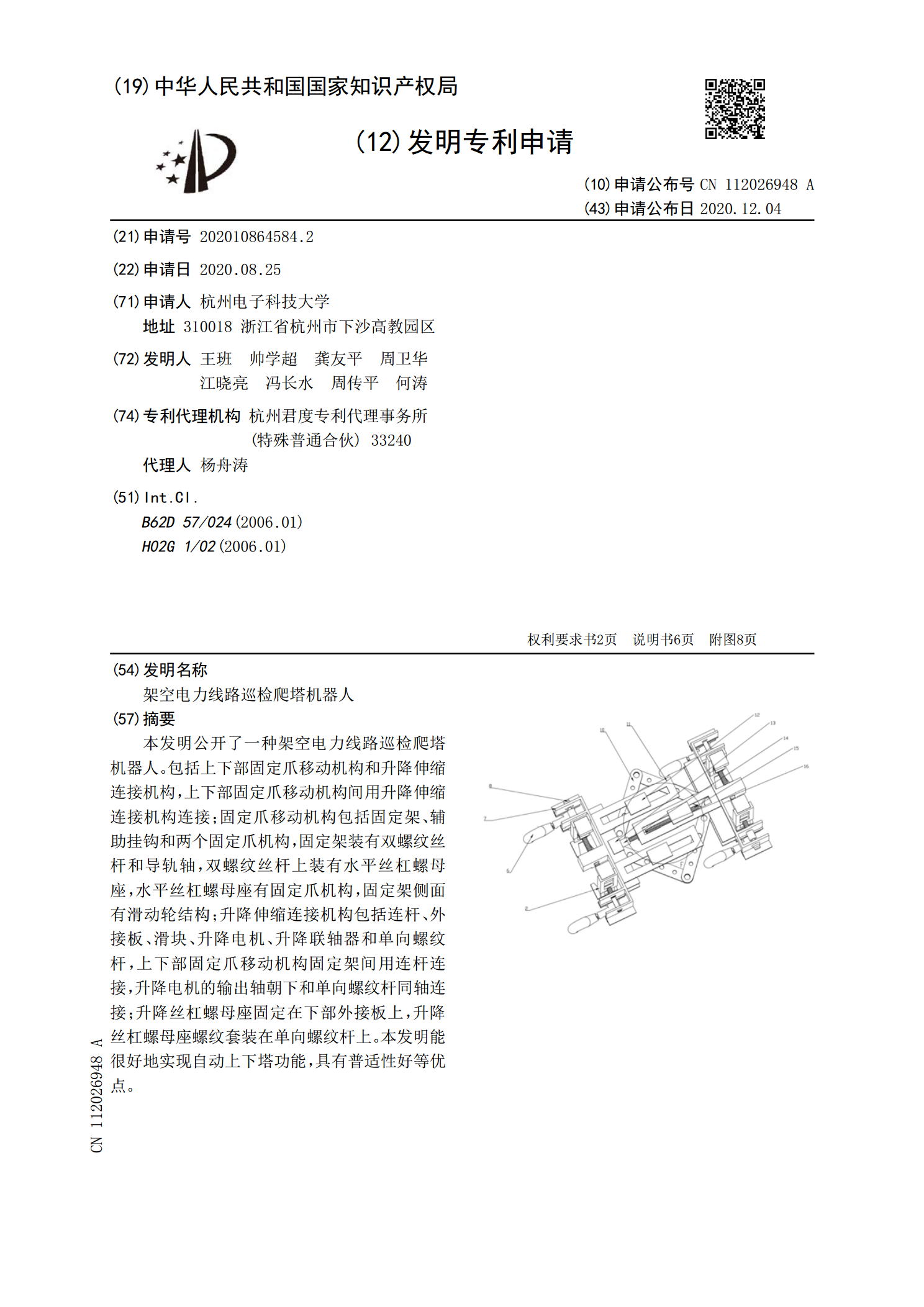
本发明公开了一种架空电力线路巡检爬塔机器人。包括上下部固定爪移动机构和升降伸缩连接机构,上下部固定爪移动机构间用升降伸缩连接机构连接;固定爪移动机构包括固定架、辅助挂钩和两个固定爪机构,固定架装有双螺纹丝杆和导轨轴,双螺纹丝杆上装有水平丝杠螺母座,水平丝杠螺母座有固定爪机构,固定架侧面有滑动轮结构;升降伸缩连接机构包括连杆、外接板、滑块、升降电机、升降联轴器和单向螺纹杆,上下部固定爪移动机构固定架间用连杆连接,升降电机的输出轴朝下和单向螺纹杆同轴连接;升降丝杠螺母座固定在下部外接板上,升降丝杠螺母座螺纹套

基于深度学习的架空线路异物巡检系统设计.docx
基于深度学习的架空线路异物巡检系统设计基于深度学习的架空线路异物巡检系统设计摘要:架空线路异物巡检是电力行业中的一项重要任务,传统的巡检方法存在效率低下、人工成本高等问题。本文提出了一种基于深度学习的架空线路异物巡检系统设计,该系统利用了深度学习算法的高效性和准确性,通过对图像进行处理和分析,自动检测出异物。实验结果表明,该系统具有较高的检测准确率和处理效率,能够大大减少人工巡检的成本和工作量,提高巡检效率。关键词:深度学习;架空线路;异物巡检;图像处理第一章介绍1.1背景架空线路是电力输电系统的重要组成

架空输电线路巡检飞行机器人的多传感器调度方法研究.pptx
汇报人:目录PARTONEPARTTWO架空输电线路巡检的重要性飞行机器人技术的引入多传感器调度方法的必要性PARTTHREE研究内容概述研究方法和技术路线实验设计与实施PARTFOUR传感器数据采集与处理调度算法设计与优化算法实现与测试PARTFIVE实验结果展示结果分析与讨论算法性能评估PARTSIX研究结论总结研究成果与贡献未来工作展望与计划THANKYOU