
调姿机构力位置混合控制系统设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

调姿机构力位置混合控制系统设计.docx
调姿机构力位置混合控制系统设计摘要:调姿机构力位置混合控制系统是一种常用于机械控制系统中的一种控制策略。本文主要介绍了调姿机构力位置混合控制系统的设计原理和实现方法。首先,对调姿机构的基本原理进行了介绍,包括力控制和位置控制的概念及其在机构设计中的应用。然后,提出了调姿机构力位置混合控制系统的设计过程,包括控制策略的选择、系统建模和参数优化等步骤。最后,通过实例分析,验证了该控制系统在调姿机构应用中的有效性。本文的研究结果可为调姿机构力位置混合控制系统的设计和应用提供参考。关键词:调姿机构;力控制;位置控

调姿机构力位置混合控制系统设计的任务书.docx
调姿机构力位置混合控制系统设计的任务书任务书:一、课题背景随着现代工业自动化、机器人技术的飞速发展,越来越多的工业生产系统和生产装备采用了自动化控制技术,其中调姿机构力位置混合控制系统是其中一种典型的自动化控制技术。调姿机构是指一种用于控制转子振动的机构系统,可以用于处理高速旋转机械产生的不良振动。力位置混合控制系统是指将位置控制和力控制相结合的一种控制方式,通过对位置信号和力信号的联合控制,实现精确的控制和调节。调姿机构力位置混合控制系统广泛应用于飞行控制系统、船舶电动机、风电机组等领域。本课题旨在设计
一种法向找正调姿机构及其调姿方法.pdf
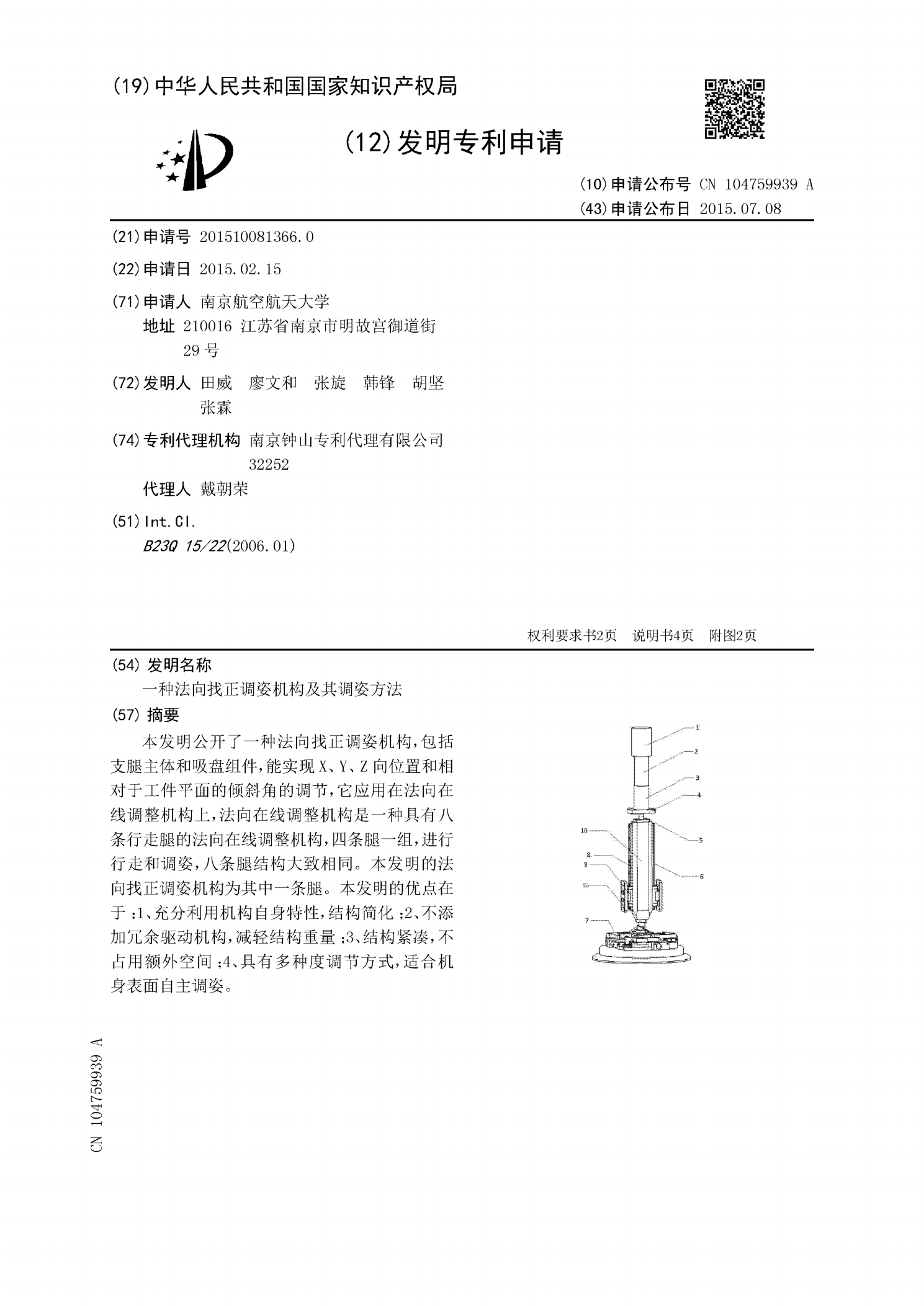
本发明公开了一种法向找正调姿机构,包括支腿主体和吸盘组件,能实现X、Y、Z向位置和相对于工件平面的倾斜角的调节,它应用在法向在线调整机构上,法向在线调整机构是一种具有八条行走腿的法向在线调整机构,四条腿一组,进行行走和调姿,八条腿结构大致相同。本发明的法向找正调姿机构为其中一条腿。本发明的优点在于:1、充分利用机构自身特性,结构简化;2、不添加冗余驱动机构,减轻结构重量;3、结构紧凑,不占用额外空间;4、具有多种度调节方式,适合机身表面自主调姿。
调姿机构、机头对合系统及方法.pdf
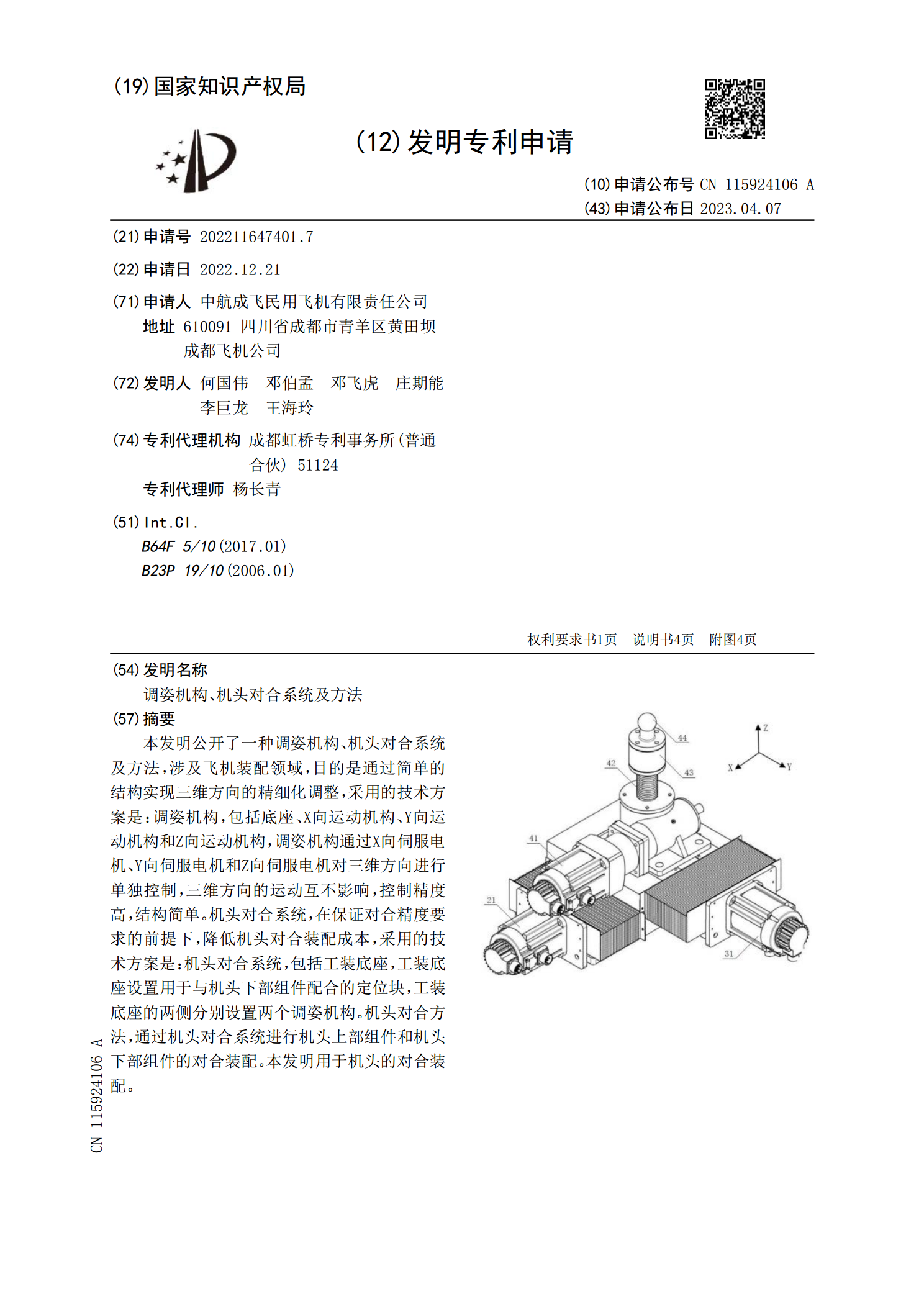
本发明公开了一种调姿机构、机头对合系统及方法,涉及飞机装配领域,目的是通过简单的结构实现三维方向的精细化调整,采用的技术方案是:调姿机构,包括底座、X向运动机构、Y向运动机构和Z向运动机构,调姿机构通过X向伺服电机、Y向伺服电机和Z向伺服电机对三维方向进行单独控制,三维方向的运动互不影响,控制精度高,结构简单。机头对合系统,在保证对合精度要求的前提下,降低机头对合装配成本,采用的技术方案是:机头对合系统,包括工装底座,工装底座设置用于与机头下部组件配合的定位块,工装底座的两侧分别设置两个调姿机构。机头对合

面向飞机大部件调姿的PPPS机构球铰点中心位置闭环标定方法.docx
面向飞机大部件调姿的PPPS机构球铰点中心位置闭环标定方法PPPS机构是飞机大部件调姿的重要组成部分,而球铰点中心位置的闭环标定方法则是保证PPPS机构正常运行的必要条件。本文将主要从以下几个方面来探讨此问题。一、PPPS机构的结构和工作原理PPPS机构是指平台定向操作机构(PitchPlatformPositioningSystem)的简称,是飞机上实现平台转动、俯仰角控制等功能的机构。简单来说,PPPS机构由球铰机构、伺服电机、减速器、控制器、传感器等部分组成,是一种控制系统。球铰机构是PPPS机构的