
离线编程中的机器人建模方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

离线编程中的机器人建模方法研究.docx
离线编程中的机器人建模方法研究离线编程中的机器人建模方法研究摘要:随着工业自动化的发展,机器人在各个领域中得到了广泛应用。离线编程是机器人自动化领域中的重要技术之一,它可以大幅度提高机器人的编程效率和准确性。在离线编程的过程中,机器人建模是非常关键的一步,它决定了机器人在实际操作中的表现和性能。本文将针对离线编程中的机器人建模方法进行研究和探讨。关键词:离线编程、机器人、建模方法1.引言近年来,随着科技的不断发展与进步,机器人技术在工业自动化领域中逐渐得到广泛应用。机器人能够取代人力完成一些枯燥、危险或高

喷漆机器人离线编程系统物体建模方法的研究.docx
喷漆机器人离线编程系统物体建模方法的研究随着制造业的不断发展,机器人技术在工业领域中已经成为了一种不可或缺的技术手段。机器人在喷漆等任务中已被广泛应用,而离线编程系统在机器人的应用中也扮演着非常重要的角色。本文将探讨喷漆机器人离线编程系统物体建模方法的研究。一、背景离线编程技术是指在机器人系统没有运动时,通过计算机软件来设计、编程和模拟机器人的工作流程,以达到快速设置机器人任务的目的。喷漆机器人离线编程系统是指将机器人应用到喷漆任务中,并通过离线编程技术实现该任务。喷漆机器人精确、高效且安全,被广泛应用于

工业机器人的离线编程方法.pptx
添加副标题目录PART01PART02离线编程的定义离线编程的优点离线编程的应用场景PART03基于模型的离线编程基于机器人的离线编程基于视觉的离线编程基于人工智能的离线编程PART04运动学建模与仿真碰撞检测与避障轨迹规划与优化控制系统设计PART05人工智能与离线编程的结合云端化与协同化的发展趋势标准化与模块化的推进离线编程在智能制造中的应用前景感谢您的观看
工业机器人离线编程方法及装置.pdf
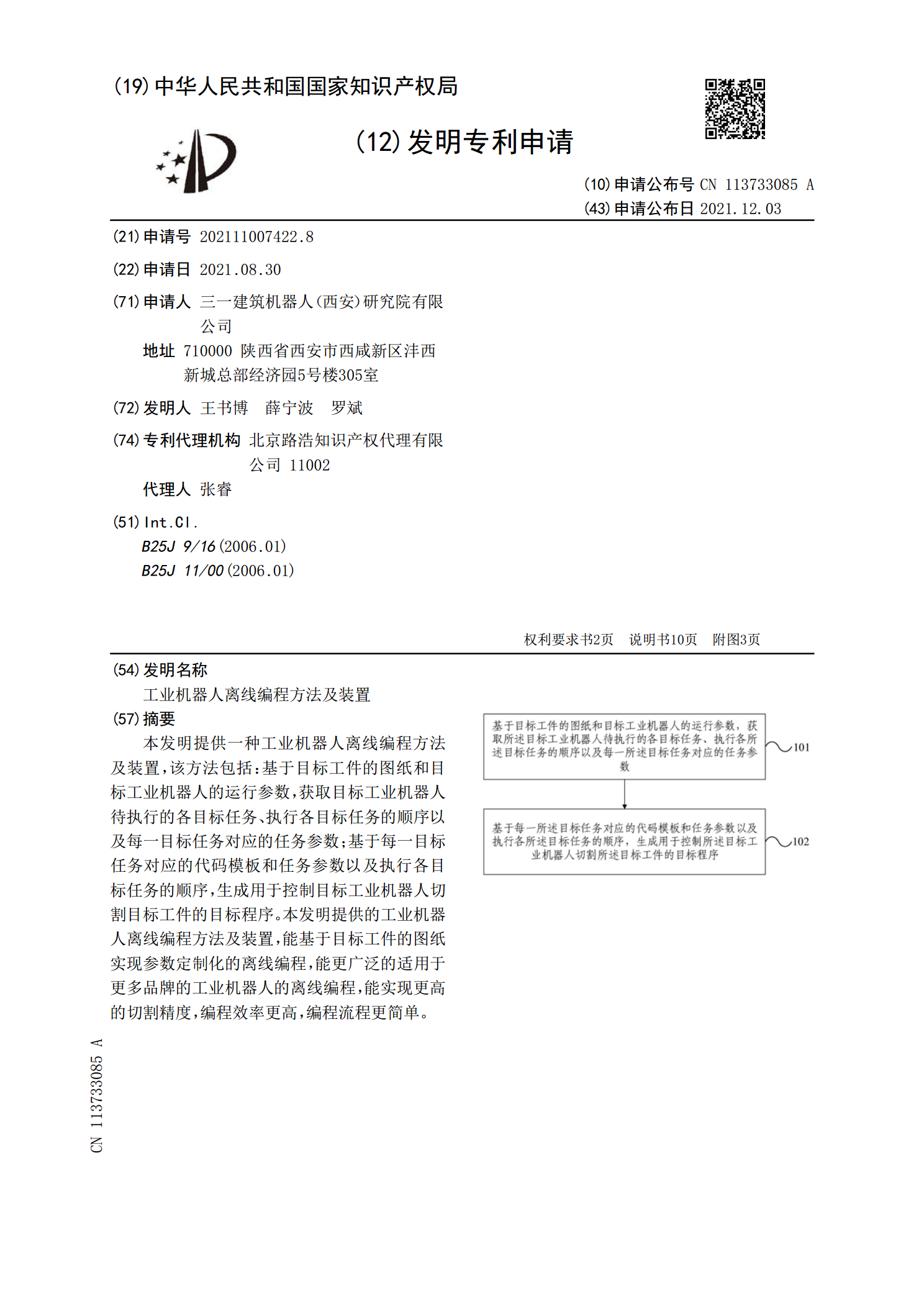
本发明提供一种工业机器人离线编程方法及装置,该方法包括:基于目标工件的图纸和目标工业机器人的运行参数,获取目标工业机器人待执行的各目标任务、执行各目标任务的顺序以及每一目标任务对应的任务参数;基于每一目标任务对应的代码模板和任务参数以及执行各目标任务的顺序,生成用于控制目标工业机器人切割目标工件的目标程序。本发明提供的工业机器人离线编程方法及装置,能基于目标工件的图纸实现参数定制化的离线编程,能更广泛的适用于更多品牌的工业机器人的离线编程,能实现更高的切割精度,编程效率更高,编程流程更简单。

机器人的离线编程.ppt
机器人编程RobotProgrammingRobotProgrammingRobotProgrammingRobotProgramming东南大学远程教育RobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRo