
液压四足机器人单腿跳跃步态规划.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

液压四足机器人单腿跳跃步态规划.docx
液压四足机器人单腿跳跃步态规划液压四足机器人单腿跳跃步态规划摘要:液压四足机器人在跳跃时,采用单腿跳跃步态进行步态规划。本文通过分析步态规划的原理和方法,设计了一种液压四足机器人的单腿跳跃步态。通过建立机器人动力学模型,运用运动规划算法,实现机器人的跳跃动作。实验结果表明,该步态可以有效地实现液压四足机器人的单腿跳跃。关键词:液压四足机器人,单腿跳跃,步态规划,动力学模型,运动规划算法1.引言液压四足机器人是一种新型的机器人,具有较高的稳定性和适应性。在特定的任务中,液压四足机器人需要进行单腿跳跃动作,以

液压驱动四足机器人单腿竖直跳跃运动分析与控制.docx
液压驱动四足机器人单腿竖直跳跃运动分析与控制随着机器人技术的不断发展,四足机器人的应用越来越广泛。其中,液压驱动四足机器人是一种比较常见的类型。本文将从液压驱动四足机器人单腿竖直跳跃的运动分析和控制两个方面入手,对该技术进行探讨。一、单腿竖直跳跃的运动分析单腿竖直跳跃是四足机器人中一种常见的运动方式。下面将对其进行运动分析。1.动力与运动学分析单腿竖直跳跃的动力分析可通过运动中的能量转化进行分析,即机器人通过液压缸产生弹簧能量,然后将弹簧能量转化为重力势能,最后将重力势能转化为机器人的动能。因此,单腿竖直

四足机器人单腿跳跃柔顺性的规划和控制研究.docx
四足机器人单腿跳跃柔顺性的规划和控制研究一、引言四足机器人单腿跳跃是一种高效、柔顺、稳定的运动方式。在很多应用场景中都有广泛的应用,例如救援、探险、跨越障碍等。因此,对于四足机器人单腿跳跃的规划与控制技术的研究目前备受关注。本文将针对四足机器人单腿跳跃柔顺性的规划和控制进行研究,旨在提高机器人的跳跃性能以及应用领域的拓展。二、四足机器人单腿跳跃柔顺性的规划四足机器人单腿跳跃柔顺性的规划是通过对机器人跳跃过程中动作轨迹的设计和优化,使机器人实现高效、优美的跳跃运动。下面从跳跃过程中腿部姿态的规划、腿部关节角
四关节液压足式机器人腿.pdf
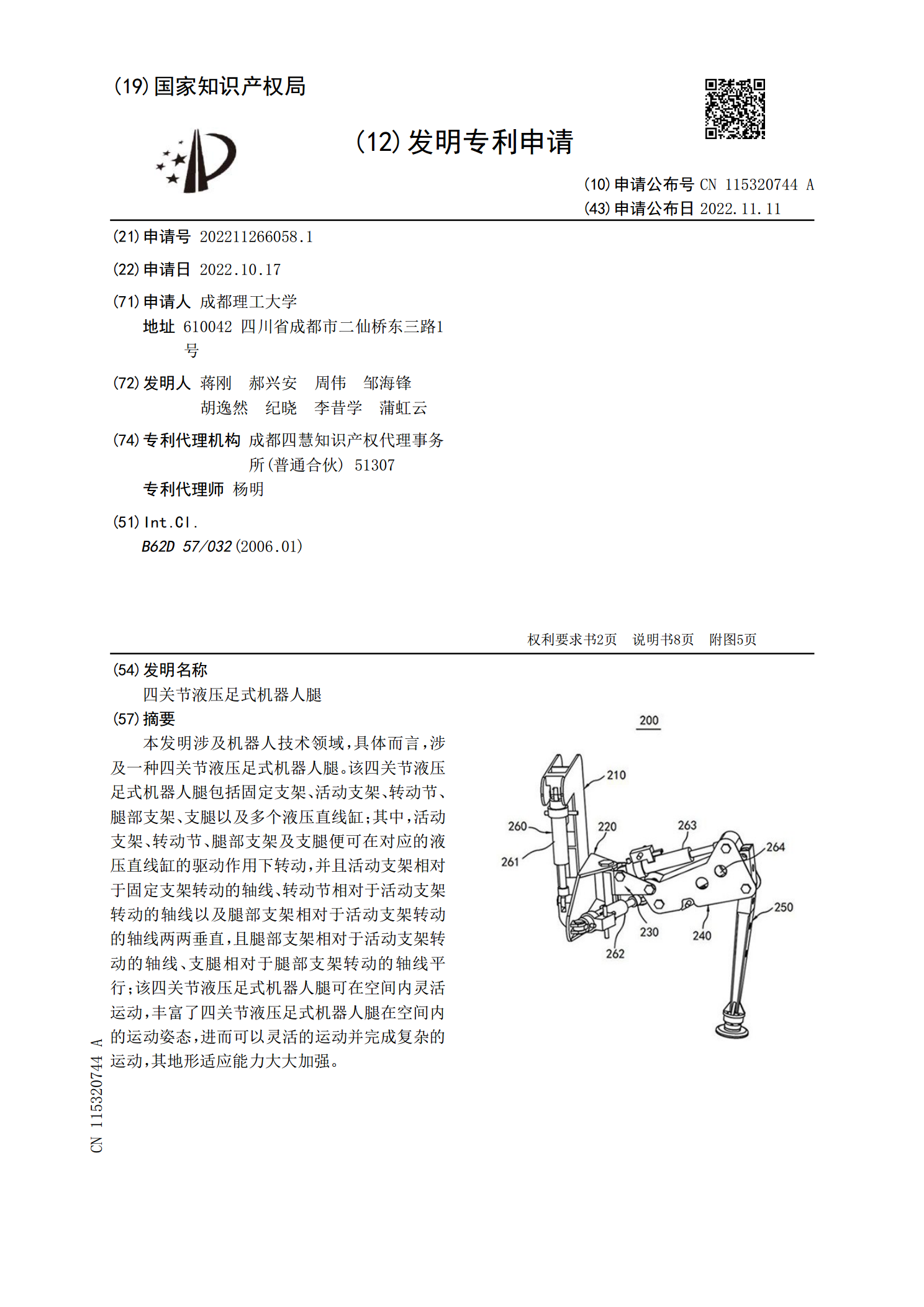
本发明涉及机器人技术领域,具体而言,涉及一种四关节液压足式机器人腿。该四关节液压足式机器人腿包括固定支架、活动支架、转动节、腿部支架、支腿以及多个液压直线缸;其中,活动支架、转动节、腿部支架及支腿便可在对应的液压直线缸的驱动作用下转动,并且活动支架相对于固定支架转动的轴线、转动节相对于活动支架转动的轴线以及腿部支架相对于活动支架转动的轴线两两垂直,且腿部支架相对于活动支架转动的轴线、支腿相对于腿部支架转动的轴线平行;该四关节液压足式机器人腿可在空间内灵活运动,丰富了四关节液压足式机器人腿在空间内的运动姿态

仿生四足机器人单腿轨迹规划研究.docx
仿生四足机器人单腿轨迹规划研究摘要仿生四足机器人的研究已成为机器人领域研究的热点。单腿轨迹规划是仿生四足机器人实现稳定行走的重要构成部分。本文介绍了仿生四足机器人的原理及其单腿的结构,阐述了单腿运动的基本规律,提出了单腿轨迹规划的方法,并通过仿真实验验证了方法的有效性。关键词:仿生四足机器人;单腿轨迹规划;稳定行走;仿真实验。AbstractTheresearchonbionicquadrupedrobotshasbecomeahotspotinthefieldofrobotics.Singlelegtr