
基于磁流变阻尼器的汽车悬架半主动控制的研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于磁流变阻尼器的汽车悬架半主动控制的研究.docx
基于磁流变阻尼器的汽车悬架半主动控制的研究摘要本文研究基于磁流变阻尼器的汽车悬架半主动控制系统,该系统能根据路况及车速实时调整阻尼器的刚度和阻尼特性,使车身稳定性和乘坐舒适性得到较好的平衡。本文首先介绍了磁流变阻尼器的工作原理和特点,接着详细分析了悬架系统的结构和运动特性,最后给出了基于控制理论的悬架半主动控制方案,通过仿真实验验证了该控制方案的有效性,并得出了一些结论和建议。关键词:磁流变阻尼器;汽车悬架;半主动控制;控制理论1.引言汽车悬架系统是汽车所必须的重要部件之一,它直接影响到车辆的稳定性、乘坐

基于磁流变减振器的汽车半主动悬架研究.docx
基于磁流变减振器的汽车半主动悬架研究摘要:近年来,在交通流量增加、道路状况差等情况下,车辆悬架系统的性能愈发重要。传统的悬架系统采用机械减震器,其对路面的反应速度与灵敏度较低,无法满足对各种路面复杂程度的承受和传递。磁流变减振器则可以基于发泡铝材料,降低车辆震动,节约能源。为了探究磁流变减振器在汽车半主动悬架研究领域中的应用及前景,本文对现有磁流变减振器的工作原理、结构特点以及减震性能进行了详细分析和介绍,并阐述其在汽车半主动悬架系统中的应用情况和研究进展,以期为今后相关领域的研究和发展提供一定的参考价值

基于磁流变阻尼器的汽车悬架半主动控制系统设计.docx
基于磁流变阻尼器的汽车悬架半主动控制系统设计基于磁流变阻尼器的汽车悬架半主动控制系统设计摘要:随着汽车工业的高速发展,人们对车辆悬架系统的性能要求越来越高,希望能够提高悬架的舒适性和稳定性。而磁流变阻尼器作为一种新型的半主动控制元件,具有调节范围广、响应速度快、控制精度高等优点,因此成为了现代汽车悬架系统中的重要组成部分。本文针对基于磁流变阻尼器的汽车悬架半主动控制系统进行了深入研究,并设计了相应的控制策略,通过数值仿真分析验证了所设计系统的有效性。关键词:汽车悬架系统;磁流变阻尼器;半主动控制;数值仿真
基于磁流变阻尼器的车辆悬架半主动控制研究_建模与直接.pdf
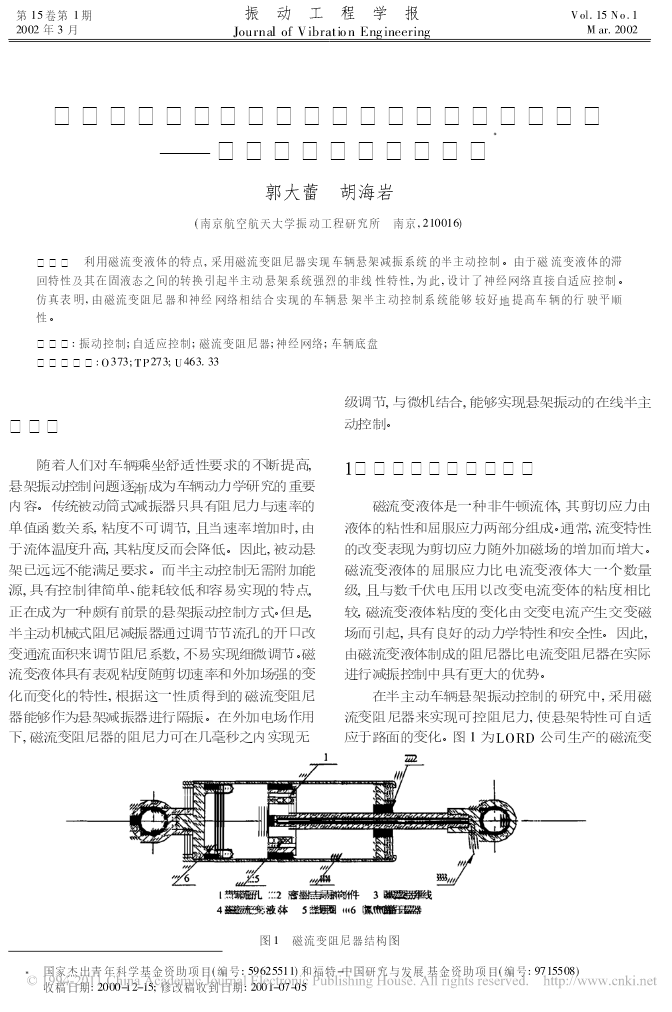
第15卷第1期振动工程学报Vol.15No.12002年3月JournalofVibrationEngineeringMar.2002基于磁流变阻尼器的车辆悬架半主动控制研究——建模与直接自适应控制�郭大蕾胡海岩(南京航空航天大学振动工程研究所南京,210016)摘要利用磁流变液体的特点,采用磁流变阻尼器实现车辆悬架减振系统的半主动控制。由于磁流变液体的滞回特性及其在固液态之间的转换引起半主动悬架系统强烈的非线性特性,为此,设计了神经网络直接自适应控制。仿真表明,由磁流变阻尼器和神经网络相结合实现的车辆悬

基于磁流变阻尼器的车辆半主动悬架智能控制研究的综述报告.docx
基于磁流变阻尼器的车辆半主动悬架智能控制研究的综述报告随着人们对于车辆乘坐舒适性和安全性越来越重视,车辆悬挂系统的研究也变得愈发重要。在悬挂系统的研究中,半主动悬挂系统由于具有较好的安全性和乘坐舒适性而备受关注。而磁流变阻尼器是一种常用于半主动悬挂系统的元件,本文将以此为基础,对于车辆半主动悬挂智能控制的研究进行综述。磁流变阻尼器(Magnetorheological(MR)Damper)是一种将流变性体作为阻尼剂的阻尼器。MR阻尼器能够通过改变电磁场的强度来调整阻尼器内部流变材料颗粒的排布,从而控制车辆