
基于PLC的微分平坦自抗扰控制算法离散化仿真及试验验证.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于PLC的微分平坦自抗扰控制算法离散化仿真及试验验证.docx
基于PLC的微分平坦自抗扰控制算法离散化仿真及试验验证基于PLC的微分平坦自抗扰控制算法离散化仿真及试验验证摘要:本文以基于PLC(可编程逻辑控制器)的微分平坦自抗扰控制算法为研究对象,通过离散化仿真及试验验证的方法,对算法的性能进行评估和验证。首先,介绍了微分平坦自抗扰控制算法的原理和优势。然后,基于MATLAB/Simulink平台进行系统仿真,并根据仿真结果进行算法的优化与调整。最后,在实际控制平台上搭建了基于PLC的控制系统,并进行了试验验证。结果表明,该算法在离散化系统中表现良好,能够有效提高控

基于PLC的微分平坦自抗扰控制算法离散化仿真及试验验证的开题报告.docx
基于PLC的微分平坦自抗扰控制算法离散化仿真及试验验证的开题报告一、选题背景近年来,随着自动化技术的不断发展和普及,工业控制领域对控制系统的性能和可靠性要求更高,尤其是在生产过程中对运动控制的要求更加苛刻和严格。在工业生产过程中,通过PLC、伺服系统和运动控制器等设施联合控制来实现物料传输、加工、包装等工作是非常常见的。因此,如何优化这些控制系统的控制效果,提高其可靠性和精度成为了近年来一个重要的研究方向。为了提高控制系统的可靠性和精度,自抗扰控制算法应运而生。自抗扰控制算法是基于动态微分平坦性理论的一种

基于PLC的线性自抗扰控制算法设计与实现.docx
基于PLC的线性自抗扰控制算法设计与实现基于PLC的线性自抗扰控制算法设计与实现摘要:近年来,随着自动化技术的飞速发展,PLC(可编程逻辑控制器)在工业自动化领域中得到了广泛应用。针对线性控制系统中存在的扰动问题,本论文设计了一种基于PLC的线性自抗扰控制算法,并通过实验验证了该算法的有效性。关键词:PLC;线性控制;自抗扰控制引言:在工业自动化系统中,控制系统的设计是一个重要问题。然而,受到各种扰动的影响,控制系统的稳定性和性能容易受到影响。因此,研究自抗扰控制算法成为了一项重要的课题。PLC作为一种可
基于微分平坦和自抗扰的四轮转向汽车轨迹跟踪控制方法.pdf
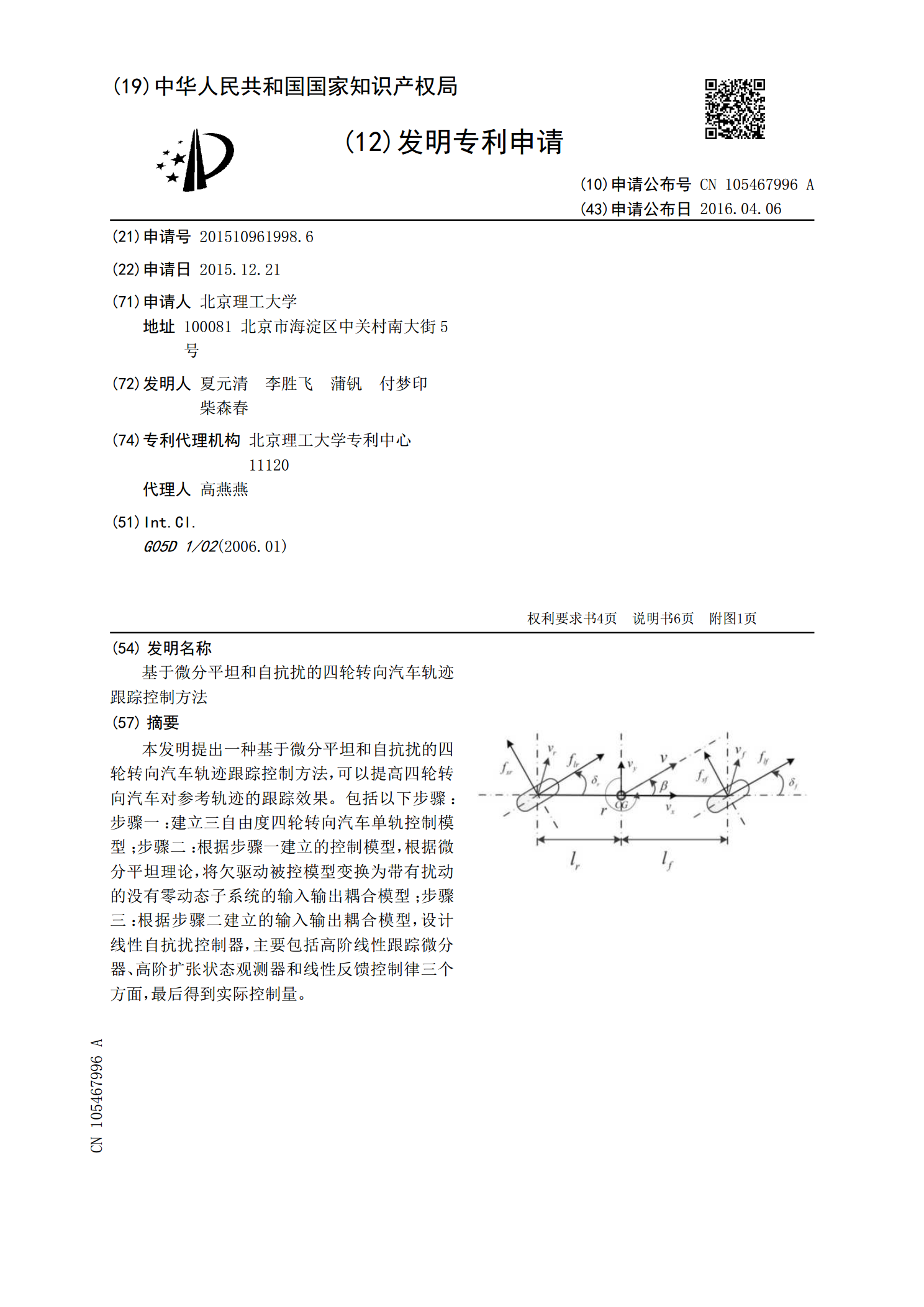
本发明提出一种基于微分平坦和自抗扰的四轮转向汽车轨迹跟踪控制方法,可以提高四轮转向汽车对参考轨迹的跟踪效果。包括以下步骤:步骤一:建立三自由度四轮转向汽车单轨控制模型;步骤二:根据步骤一建立的控制模型,根据微分平坦理论,将欠驱动被控模型变换为带有扰动的没有零动态子系统的输入输出耦合模型;步骤三:根据步骤二建立的输入输出耦合模型,设计线性自抗扰控制器,主要包括高阶线性跟踪微分器、高阶扩张状态观测器和线性反馈控制律三个方面,最后得到实际控制量。

基于PLC的线性自抗扰控制算法试验平台设计与实现的任务书.docx
基于PLC的线性自抗扰控制算法试验平台设计与实现的任务书一、任务背景随着工程控制领域的不断发展,PLC已成为现代自动化控制系统中最为常用的控制单元。在工业生产中,传统的PID控制往往会受到环境干扰、负载变化、传感器误差等问题的影响,导致控制精度差,控制效果不理想。因此,如何利用PLC实现自适应、自抗扰控制是工程领域的热门话题之一。针对上述问题,本项目旨在设计一种基于PLC的线性自抗扰控制算法试验平台,以验证该算法在工程应用中的有效性,实现控制精度提升、运行稳定等目标,促进工控领域技术的创新和实用化。二、任