
基于改进卡尔曼滤波算法的SOC估计方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进卡尔曼滤波算法的SOC估计方法研究.docx
基于改进卡尔曼滤波算法的SOC估计方法研究随着电动汽车的普及,电池状态的估计成为关键技术。电池的状态包括电池剩余能量(SOC)和电池剩余寿命(SOH)等。在电池管理系统中,准确估计电池的SOC是非常重要的。因为SOC是估算电池容量和能量储备的重要指标,对于保证电力系统的稳定性和效率起着关键作用。本文提出了一种基于改进卡尔曼滤波算法的SOC估计方法。一、卡尔曼滤波算法卡尔曼滤波算法是一种最优滤波方法,广泛应用于控制系统、信号处理、导航和预测等领域。它根据系统的状态方程和测量方程,基于贝叶斯理论推导出一个递归

基于改进卡尔曼滤波算法的SOC估计方法研究的中期报告.docx
基于改进卡尔曼滤波算法的SOC估计方法研究的中期报告一、研究背景和意义随着新能源汽车的快速发展,电池组成为其最重要的组成部分之一,因此电池状态估计技术显得十分重要。其中,电池的电量状态(SOC,StateofCharge)估计是电池管理系统(BMS,BatteryManagementSystem)中的关键问题,其准确度直接影响到电池的使用寿命和行驶里程等。因此,研究一种高精度、高效的SOC估计算法具有重要的研究意义和应用价值。二、研究内容和方法1.研究内容本文主要研究基于改进卡尔曼滤波算法的SOC估计方法

基于双重卡尔曼滤波器电池SOC估计的算法研究.docx
基于双重卡尔曼滤波器电池SOC估计的算法研究摘要:本文针对电动汽车中电池的SOC估计问题,基于双重卡尔曼滤波算法提出SOC估计方法。首先,对电池进行建模,利用开路电压法与电化学模型相结合进行SOC估计;其次,基于双重卡尔曼滤波器对估计结果进行滤波处理,达到提高估计精度的目的。结果表明,该方法可以在降低误差的同时大幅提高估计精度,具有良好的实用性和可行性。关键词:电池SOC估计,双重卡尔曼滤波,开路电压法,电化学模型,估计精度引言:随着全球环保意识的不断提高,电动汽车被越来越多的人所接受。电动汽车中电池是非

基于改进扩展卡尔曼滤波的锂电池SOC估计.docx
基于改进扩展卡尔曼滤波的锂电池SOC估计基于改进扩展卡尔曼滤波的锂电池SOC估计摘要:随着锂电池在电动汽车等领域的广泛应用,准确估计锂电池的剩余电荷(SOC)对于保证电池的安全和优化电池系统的工作具有重要意义。扩展卡尔曼滤波(EKF)是目前较为常用的一种估计SOC的滤波方法,但其对系统模型的线性化处理过程可能导致估计偏差较大的问题。本文基于改进扩展卡尔曼滤波算法,提出了一种用于锂电池SOC估计的新方法。通过引入非线性函数和新的观测模型,该方法使得滤波器在估计锂电池SOC时具有更高的精度和稳定性。实验结果表
一种基于分数阶扩展卡尔曼滤波算法的SOC估计方法.pdf
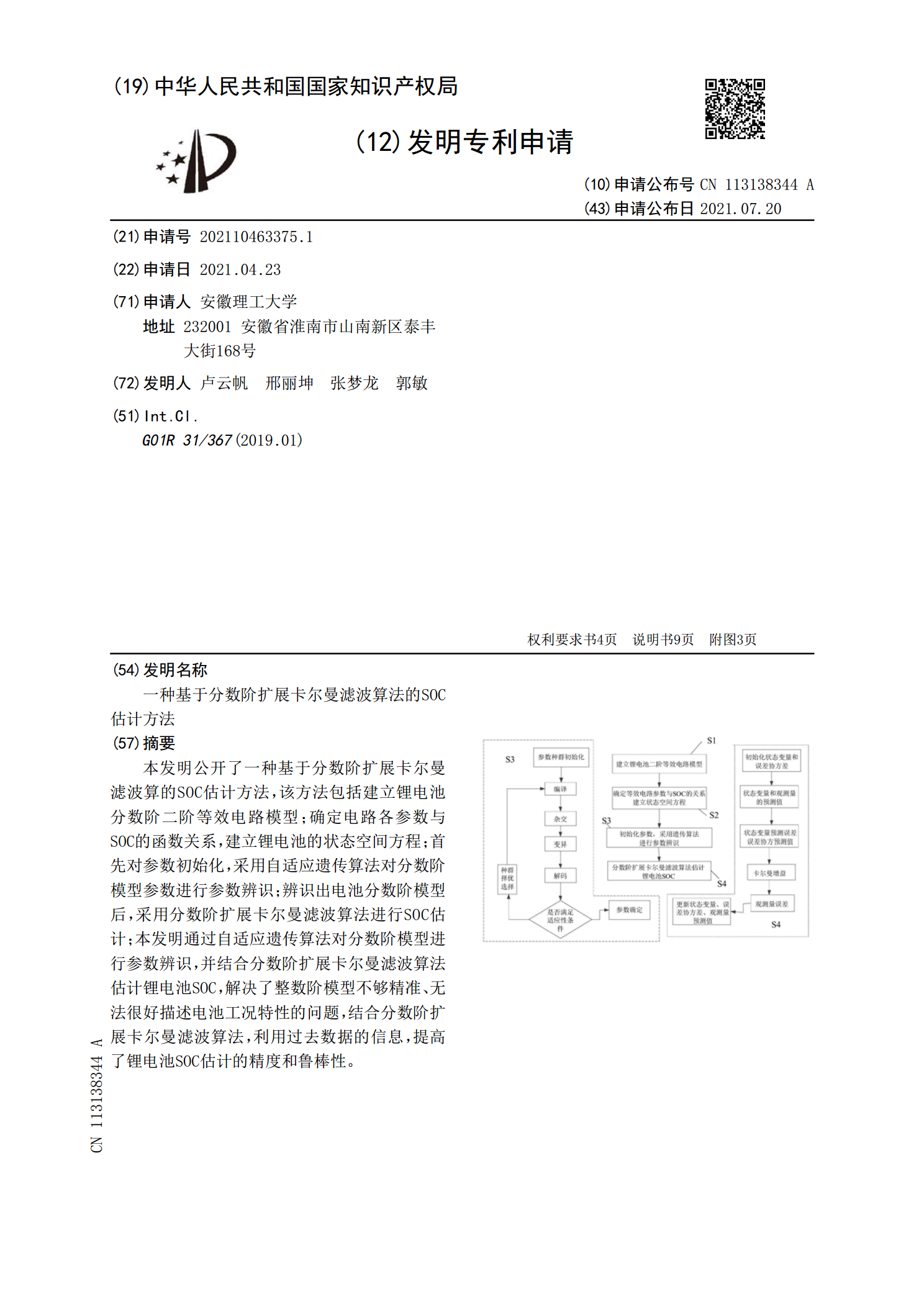
本发明公开了一种基于分数阶扩展卡尔曼滤波算的SOC估计方法,该方法包括建立锂电池分数阶二阶等效电路模型;确定电路各参数与SOC的函数关系,建立锂电池的状态空间方程;首先对参数初始化,采用自适应遗传算法对分数阶模型参数进行参数辨识;辨识出电池分数阶模型后,采用分数阶扩展卡尔曼滤波算法进行SOC估计;本发明通过自适应遗传算法对分数阶模型进行参数辨识,并结合分数阶扩展卡尔曼滤波算法估计锂电池SOC,解决了整数阶模型不够精准、无法很好描述电池工况特性的问题,结合分数阶扩展卡尔曼滤波算法,利用过去数据的信息,提高了