
可重构激光雷达数据采集平台研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

可重构激光雷达数据采集平台研究.docx
可重构激光雷达数据采集平台研究一、引言激光雷达(Lidar)技术以其高精度、全天候、全自动等优点,被广泛应用于机器人导航、无人驾驶、三维建模、环境监测等领域。不同类型的激光雷达,在感知范围、采样率、分辨率等方面都有不同的特点,如机械式激光雷达(如VelodyneHDL-64E)具有360度全方位采集,但采样率较低;而固态激光雷达(如HesaiPandar64)则采样率较高,但视野有限。在实际应用中,常常需要选择不同的激光雷达进行采集,并对数据进行融合和处理,以获得更准确、更全面的环境模型。然而,不同激光雷

可重构激光雷达数据采集平台研究的中期报告.docx
可重构激光雷达数据采集平台研究的中期报告本报告是关于可重构激光雷达数据采集平台研究的中期报告,主要介绍了该平台的研究进展、设计方案、实验结果以及下一步工作计划。一、研究进展在前期研究的基础上,本项目完成了以下任务:1.收集和分析了现有可重构平台的相关研究成果,包括可编程逻辑器件和片上系统等,了解了它们的特点、优缺点和应用范围。2.完成了激光雷达数据采集平台的设计方案,据此进行了系统的硬件和软件设计工作。其中,硬件设计包括了主控制器、输入输出接口、存储及通信模块的设计;软件设计包括了基于FPGA的数据处理、

激光雷达数据采集系统框架研究.docx
激光雷达数据采集系统框架研究激光雷达数据采集系统框架研究摘要:激光雷达是一种高精度、高分辨率的传感器,广泛应用于地图制作、机器人导航、自动驾驶等领域。激光雷达数据采集系统是指用于收集和处理激光雷达数据的软件和硬件系统。本文主要研究激光雷达数据采集系统的框架,探讨其设计原理和实现方法。关键词:激光雷达;数据采集;系统框架1.引言激光雷达是一种能够通过发送激光束并测量其返回时间来感知周围环境的传感器。与传统的传感器相比,激光雷达具有高精度、高分辨率和长探测距离等优势。因此,在自动驾驶、机器人导航和环境感知等领

自适应数据采集与重构算法仿真研究.docx
自适应数据采集与重构算法仿真研究随着时代的发展,数据采集成为了人们获取信息、了解市场、做出决策的重要手段。在大数据时代的背景下,如何高效地采集、处理和重构数据成为了关注的焦点。因此,本文将探讨自适应数据采集与重构算法的仿真研究。一、研究背景数据采集和重构是现代社会数据处理的核心环节,可以帮助企业和政府快速了解市场需求以及公众意见,从而支持企业和政府做出决策。由于数据规模和种类的迅速增长,传统的人工采集方式已经不能满足数据处理的需求,数据自动化采集与重构技术变得越来越重要。因此,开发一种自适应的数据采集与重
一种多视角可重构人脸数据采集系统.pdf
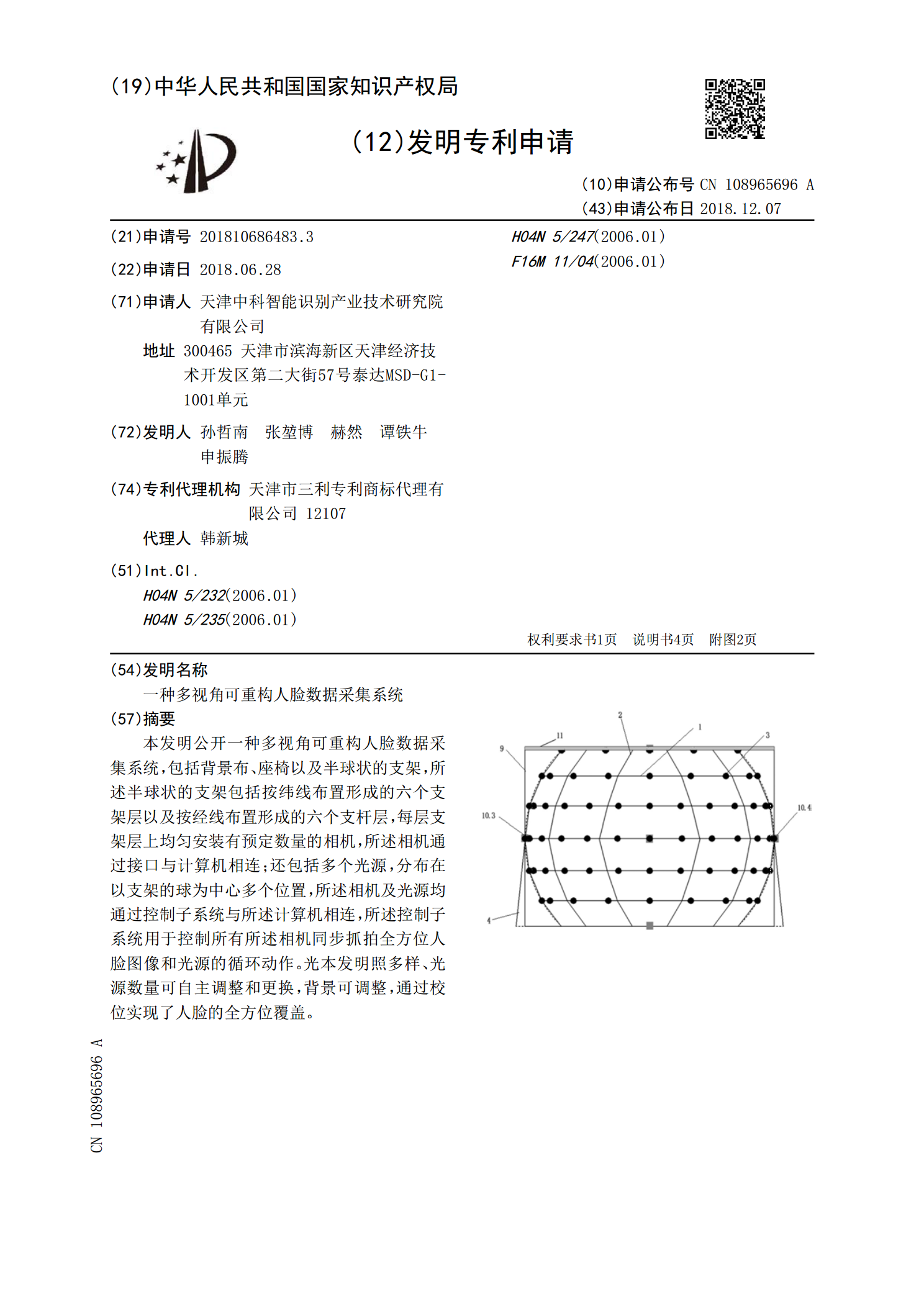
本发明公开一种多视角可重构人脸数据采集系统,包括背景布、座椅以及半球状的支架,所述半球状的支架包括按纬线布置形成的六个支架层以及按经线布置形成的六个支杆层,每层支架层上均匀安装有预定数量的相机,所述相机通过接口与计算机相连;还包括多个光源,分布在以支架的球为中心多个位置,所述相机及光源均通过控制子系统与所述计算机相连,所述控制子系统用于控制所有所述相机同步抓拍全方位人脸图像和光源的循环动作。光本发明照多样、光源数量可自主调整和更换,背景可调整,通过校位实现了人脸的全方位覆盖。