
等效鉴相器法及其应用.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

等效鉴相器法及其应用.docx
等效鉴相器法及其应用等效鉴相器法及其应用摘要:等效鉴相器法是一种广泛应用于图像处理及计算机视觉领域的技术。本文首先介绍了等效鉴相器法的基本原理和工作流程,然后详细探讨了该方法在图像匹配、图像配准和图像识别等方面的应用。通过对该方法的分析与比较,我们发现等效鉴相器法不仅可以提高图像处理的速度和准确性,同时还能在复杂的图像场景中实现更好的效果。因此,等效鉴相器法在计算机视觉和图像处理的应用领域具有广阔的前景。关键词:等效鉴相器法,图像处理,计算机视觉,图像匹配,图像配准,图像识别Ⅰ.引言计算机视觉和图像处理技

正交鉴相电路及其鉴相精度分析.docx
正交鉴相电路及其鉴相精度分析正交鉴相电路(QuadratureDemodulationCircuit)是一种常见的信号处理电路,主要用于解调带有相位偏移的调制信号。鉴相(Demodulation)是指将调制信号从高频信号转换为低频信号的过程,而正交鉴相电路则是其中的一种实现方式。正交鉴相电路的基本原理是利用正交信号相位差为90度的特性,将原始信号分解为两个正交(垂直)的信号,然后分别进行解调。一般来说,正交鉴相电路由四个模块组成:信号输入模块、90度相移模块、乘法混频器模块和低通滤波器模块。首先,信号输入
鉴频鉴相器电路.pdf
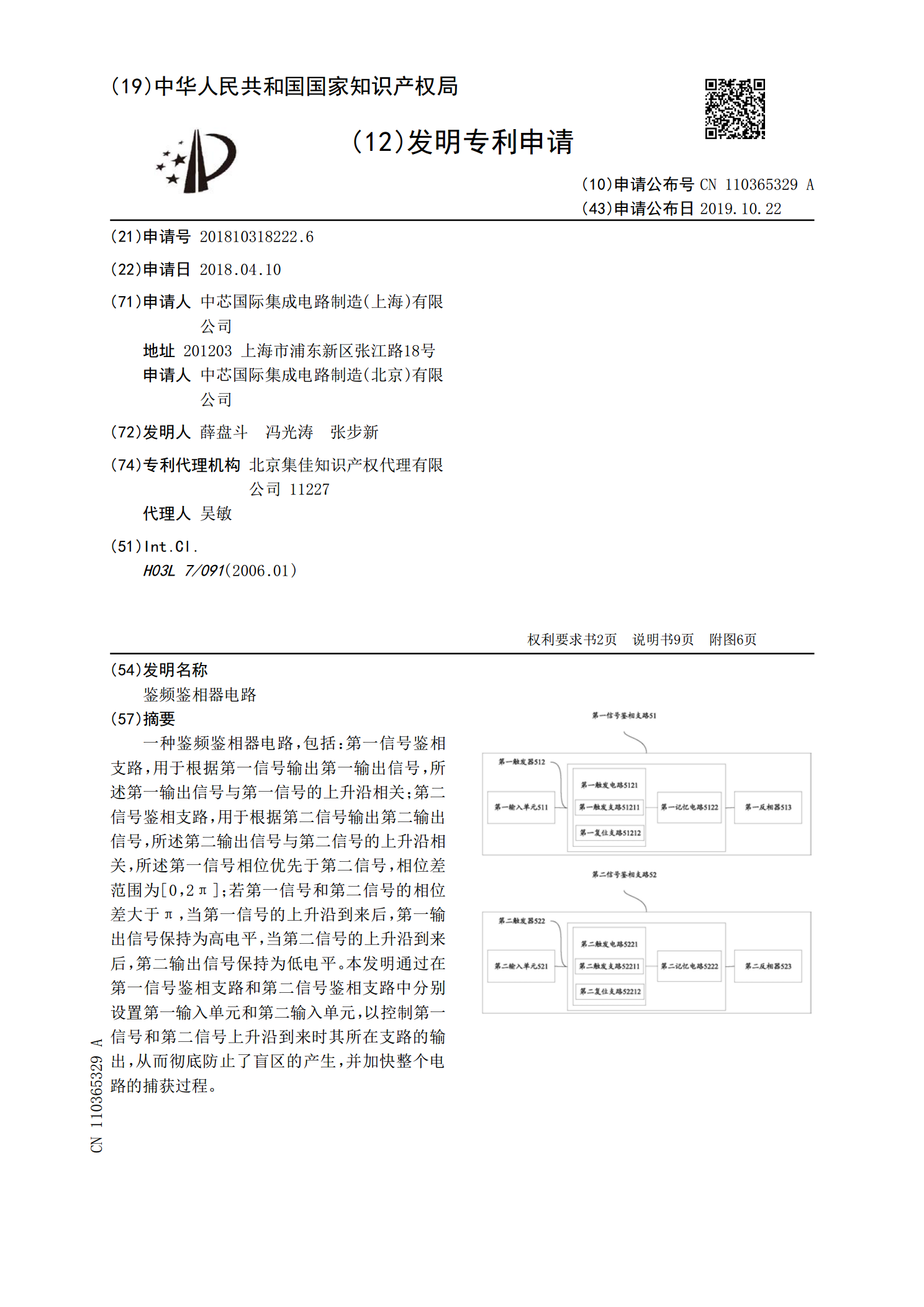
一种鉴频鉴相器电路,包括:第一信号鉴相支路,用于根据第一信号输出第一输出信号,所述第一输出信号与第一信号的上升沿相关;第二信号鉴相支路,用于根据第二信号输出第二输出信号,所述第二输出信号与第二信号的上升沿相关,所述第一信号相位优先于第二信号,相位差范围为[0,2π];若第一信号和第二信号的相位差大于π,当第一信号的上升沿到来后,第一输出信号保持为高电平,当第二信号的上升沿到来后,第二输出信号保持为低电平。本发明通过在第一信号鉴相支路和第二信号鉴相支路中分别设置第一输入单元和第二输入单元,以控制第一信号和第

ST002脉冲鉴相器的工作原理和应用.docx
ST002脉冲鉴相器的工作原理和应用摘要:本文主要介绍了一种脉冲鉴相器——ST002脉冲鉴相器的工作原理和应用。在工业生产中,电力系统中的电能质量问题一直是电能领域无法避免的重要问题。而脉冲鉴相器的出现可以大大提高电力系统的质量,提高电能的稳定性和稳定性。关键词:脉冲鉴相器、电能质量、电力系统、稳定性、可靠性一、简介电力系统是大力发展的重要支点之一,具有着巨大的社会和经济效益,容易受到技术和环境等多种因素的影响。其中,电能质量问题在电力系统中扮演着重要角色。电能质量是指电能在供电过程中所保持的电压、频率、

基于MCML的鉴相器设计.docx
基于MCML的鉴相器设计一、绪论随着计算机技术的快速发展和应用,计算机模拟技术已经广泛应用于各个领域。医学光学成像也得到了很大的发展,其中基于蒙特卡罗方法的医学光学计算模型(MonteCarlomodelinginmedicaloptics,简称MCML)成为了医学光学成像领域的一个重要研究方向。MCML可以计算光在多种多样的生物组织中传输和扩散,为医学光学成像技术的研究提供了重要的支持和帮助。鉴相器是医学光学成像中常用的设备,它可以用于判断组织的性质和病变情况。MCML可以用于鉴相器的设计和优化,有助于