
相机测量技术在舱段自动对接中的应用研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

相机测量技术在舱段自动对接中的应用研究.docx
相机测量技术在舱段自动对接中的应用研究相机测量技术在舱段自动对接中的应用研究摘要:舱段自动对接是宇航员进行太空任务时的重要环节,对于确保任务的顺利进行具有关键意义。相机测量技术作为一种非接触式测量手段,在舱段自动对接中的应用广泛而有效。本文将介绍相机测量技术在舱段自动对接中的原理、方法及其应用效果。通过对相机测量技术在舱段自动对接中的应用研究,可以为未来太空任务的顺利进行提供重要的技术支持。关键词:相机测量技术,舱段自动对接,非接触式测量,应用研究第一章引言舱段自动对接是宇航员进行太空任务时的重要环节,通

相机测量技术在舱段自动对接中的应用研究的开题报告.docx
相机测量技术在舱段自动对接中的应用研究的开题报告一、选题背景和意义舱段自动对接是航天飞行任务中最关键的环节之一,它直接关系到飞行任务的顺利完成和航天员的安全。舱段自动对接的实现是一个复杂的系统,需要涉及多个学科领域,其中相机测量技术在该系统中起着至关重要的作用。相机测量技术是一种实现真实物体尺寸、形状、位置和姿态等参数测定的技术,这种技术与传统的测量方法相比,更加准确、快速和精确。在舱段自动对接中,相机测量技术可以用于对舱段的几何参数进行测量和分析,以便确定舱段的精确位置和姿态,从而确保自动对接效果的准确
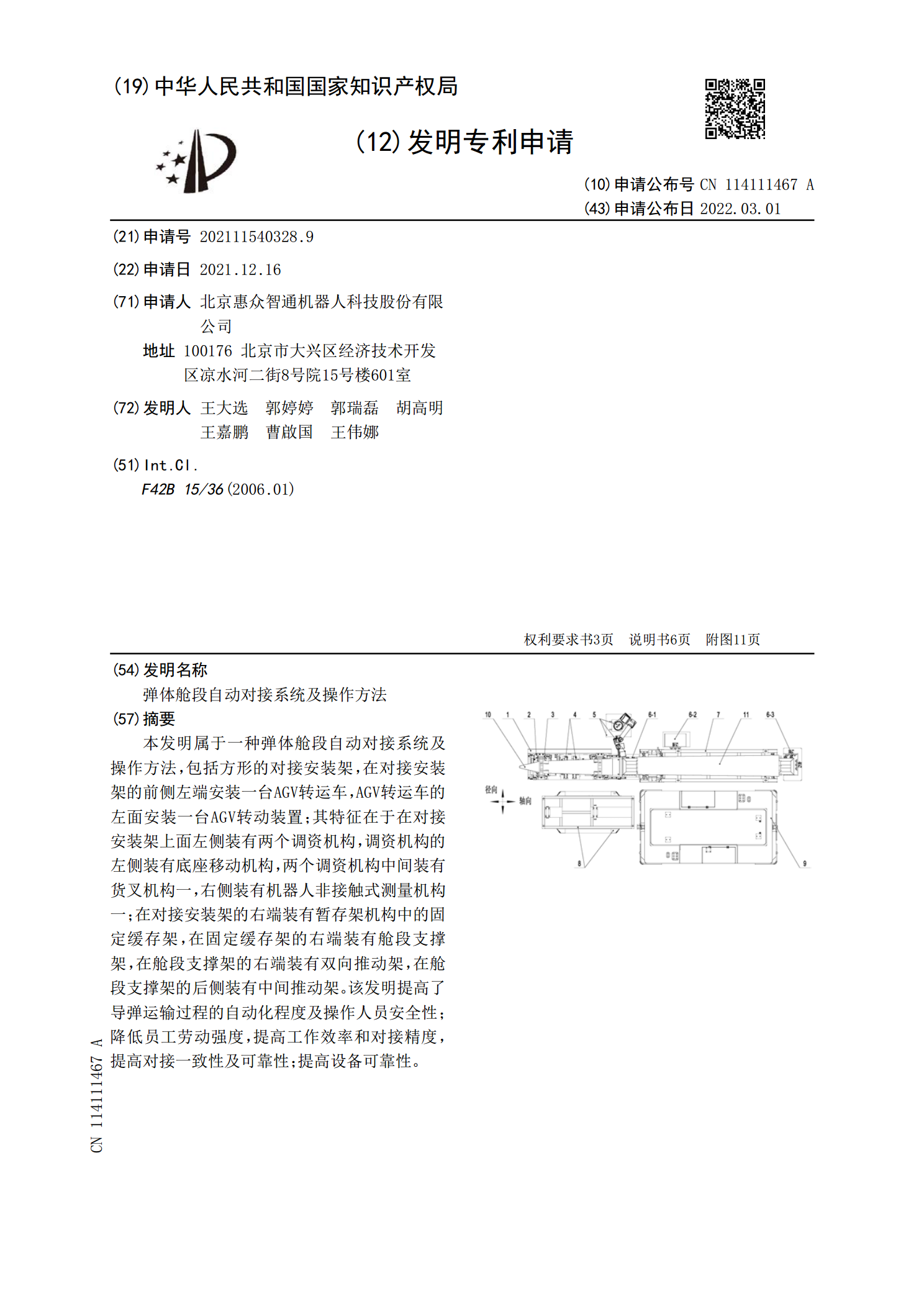
弹体舱段自动对接系统及操作方法.pdf
本发明属于一种弹体舱段自动对接系统及操作方法,包括方形的对接安装架,在对接安装架的前侧左端安装一台AGV转运车,AGV转运车的左面安装一台AGV转动装置;其特征在于在对接安装架上面左侧装有两个调资机构,调资机构的左侧装有底座移动机构,两个调资机构中间装有货叉机构一,右侧装有机器人非接触式测量机构一;在对接安装架的右端装有暂存架机构中的固定缓存架,在固定缓存架的右端装有舱段支撑架,在舱段支撑架的右端装有双向推动架,在舱段支撑架的后侧装有中间推动架。该发明提高了导弹运输过程的自动化程度及操作人员安全性;降低员
舱段自动对接实验教学平台的设计与应用.pptx
汇报人:目录PARTONE平台简介平台构成平台功能PARTTWO设计理念设计流程关键技术创新点PARTTHREE应用场景应用效果实验案例实验结果分析PARTFOUR优势分析局限性分析改进方向PARTFIVE技术发展趋势应用领域拓展未来展望THANKYOU

基于Stewart平台的导弹舱段自动对接方法研究.docx
基于Stewart平台的导弹舱段自动对接方法研究基于Stewart平台的导弹舱段自动对接方法研究摘要:随着航空航天技术的不断发展,导弹舱段自动对接技术在导弹制导系统中起着至关重要的作用。本文针对Stewart平台的导弹舱段自动对接问题,提出了一种基于PID控制器和图像识别的自动对接方法。通过模拟实验和实际试验,验证了该方法的可行性和有效性。关键词:Stewart平台;自动对接;PID控制器;图像识别;试验验证一、导弹舱段自动对接技术的意义导弹制导系统是导弹的重要组成部分,其中导弹舱段是导弹存储弹头和制导系