
用于微创外科的线驱动连续型手术机器人设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于微创外科的线驱动连续型手术机器人设计.docx
用于微创外科的线驱动连续型手术机器人设计设计标题:基于线驱动的连续型微创外科手术机器人设计与研究摘要:随着医疗技术的进步,微创外科手术成为了一种越来越流行的治疗方式。为了提高手术过程的精确度和操纵灵活度,设计了一种基于线驱动的连续型微创外科手术机器人。本论文详细介绍了该系统的设计原理、结构组成、控制方案和实验结果,并对其性能进行了评价和讨论。实验证明,该手术机器人具有较高的精确度和操纵灵活度,并且能够满足微创外科手术的需要。关键词:微创外科手术、手术机器人、线驱动、精确度、操纵灵活度1.引言微创外科手术是

用于微创外科的线驱动连续型手术机器人设计的开题报告.docx
用于微创外科的线驱动连续型手术机器人设计的开题报告引言随着微创外科技术的不断发展,线驱动连续型手术机器人越来越受到关注。与传统的手术方式相比,线驱动连续型手术机器人减少了患者的疼痛和切口,提高了手术的准确性和成功率。因此,本文旨在探讨用于微创外科的线驱动连续型手术机器人的设计问题,以提高手术的效率和精度。背景随着人们对健康意识的提高,越来越多的人开始关注自身的健康问题。然而,传统的手术方式往往需要进行开刀、切除等操作,不仅容易造成患者疼痛,还有一定的风险。因此,微创外科手术逐渐成为医疗领域的热门话题。微创

用于微创外科的线驱动连续型手术机器人设计的任务书.docx
用于微创外科的线驱动连续型手术机器人设计的任务书任务书I.背景随着医疗技术的发展,越来越多的医院开始采用微创手术技术。然而,这种手术技术对外科医生的要求比传统手术更高。因此,需要一种专门的工具来协助外科医生进行微创手术。手术机器人是一种能够帮助医生进行手术的工具,已经被广泛应用于微创手术领域。然而,目前大多数手术机器人的成本很高,且需要配备专业的技术人员来操作,使得这些机器人仅适用于一些高端医院。为解决这个问题,设计一个低成本、易操作的手术机器人显得尤为重要。II.目标本项目旨在设计一款低成本的线驱动连续
一种用于微创外科手术机器人手术器械.pdf
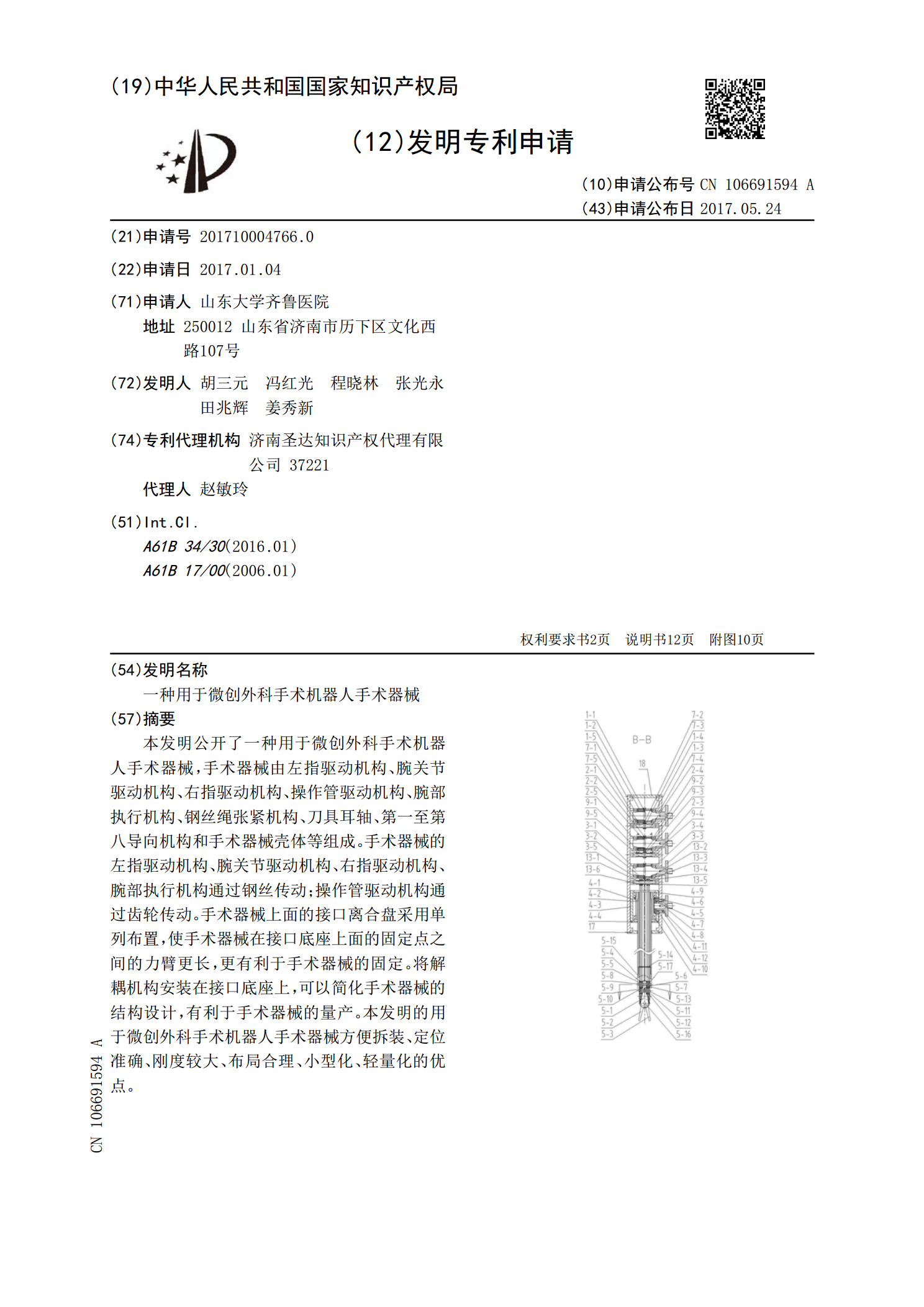
本发明公开了一种用于微创外科手术机器人手术器械,手术器械由左指驱动机构、腕关节驱动机构、右指驱动机构、操作管驱动机构、腕部执行机构、钢丝绳张紧机构、刀具耳轴、第一至第八导向机构和手术器械壳体等组成。手术器械的左指驱动机构、腕关节驱动机构、右指驱动机构、腕部执行机构通过钢丝传动;操作管驱动机构通过齿轮传动。手术器械上面的接口离合盘采用单列布置,使手术器械在接口底座上面的固定点之间的力臂更长,更有利于手术器械的固定。将解耦机构安装在接口底座上,可以简化手术器械的结构设计,有利于手术器械的量产。本发明的用于微创
外科手术器械驱动机构、超声刀及微创手术机器人.pdf
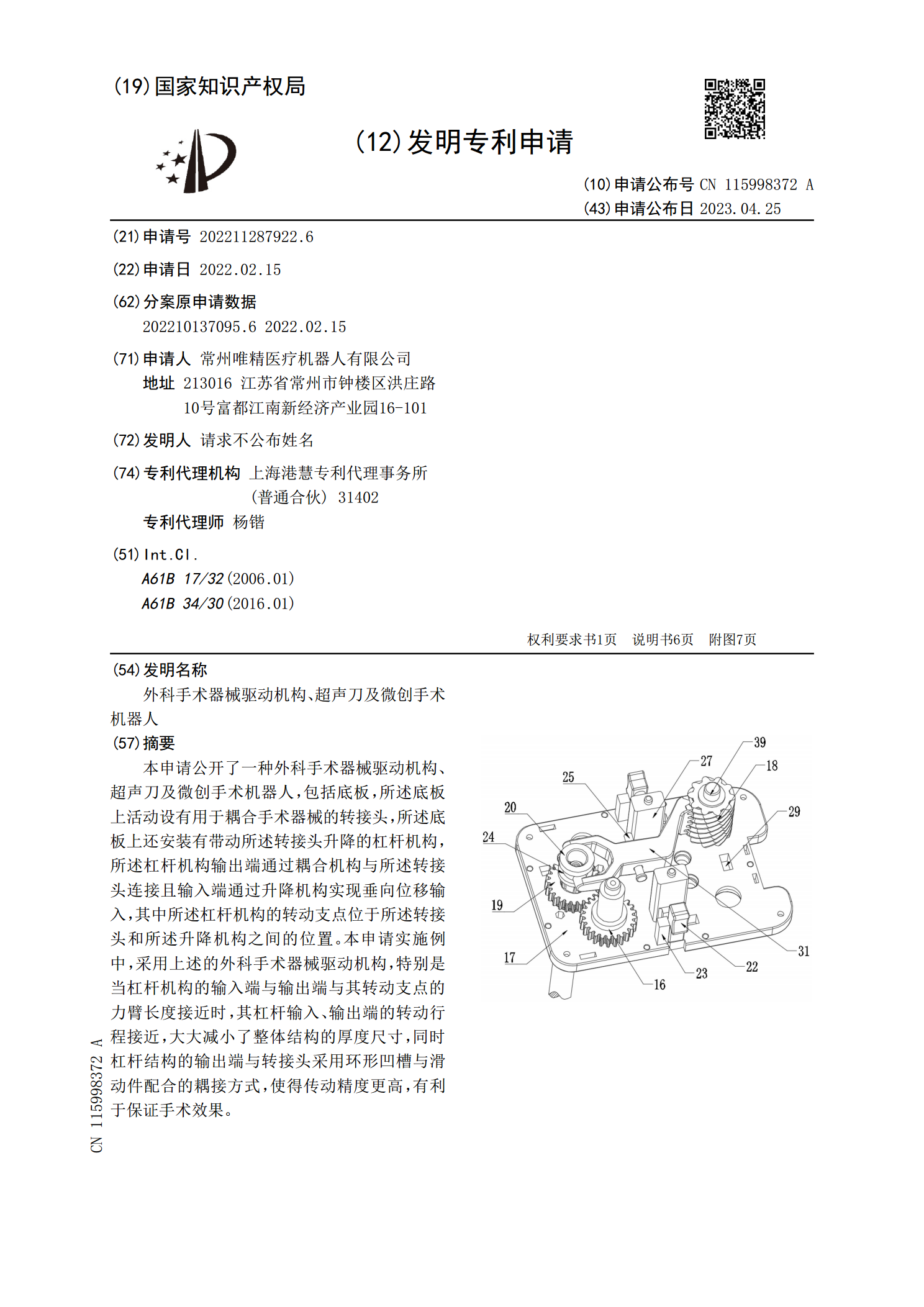
本申请公开了一种外科手术器械驱动机构、超声刀及微创手术机器人,包括底板,所述底板上活动设有用于耦合手术器械的转接头,所述底板上还安装有带动所述转接头升降的杠杆机构,所述杠杆机构输出端通过耦合机构与所述转接头连接且输入端通过升降机构实现垂向位移输入,其中所述杠杆机构的转动支点位于所述转接头和所述升降机构之间的位置。本申请实施例中,采用上述的外科手术器械驱动机构,特别是当杠杆机构的输入端与输出端与其转动支点的力臂长度接近时,其杠杆输入、输出端的转动行程接近,大大减小了整体结构的厚度尺寸,同时杠杆结构的输出端与