
水下船体清刷机器人设计及壁面行走控制研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

水下船体清刷机器人设计及壁面行走控制研究.docx
水下船体清刷机器人设计及壁面行走控制研究水下船体清刷机器人设计及壁面行走控制研究摘要:随着水下工作的需要,水下船体清刷机器人被广泛应用于船体清洁工作。本文主要研究水下船体清刷机器人的设计和壁面行走控制技术。首先,本文介绍了水下船体清刷机器人的工作原理和主要组成部分;然后,针对机器人在水下环境中的特殊需求,本文对机器人的设计进行了详细阐述;最后,本文对壁面行走控制技术进行了探讨,并提出了一种基于传感器和控制算法的壁面行走控制方案。实验证明,该方案具有较好的稳定性和精确性。关键词:水下船体清刷机器人,壁面行走

水下船体清刷机器人设计及壁面行走控制研究的开题报告.docx
水下船体清刷机器人设计及壁面行走控制研究的开题报告开题报告一、研究背景随着人类对海洋资源的需求增加,海洋开发逐渐成为一个重要的领域。为了保证海洋生态的平衡以及保护生态环境,海洋清洁工作变得越来越重要。目前,对于海底船体清洁工作主要还是人工潜水操作,这存在安全隐患,同时还容易造成对海洋生态环境的破坏。因此,针对这一问题,研究和开发一种水下船体清刷机器人已经成为一个热门的研究方向。该机器人可以在水下对船体进行自动清洗,不仅可以提高工作效率,同时降低安全风险,保护海洋生态环境。二、研究目的和研究内容本次研究的主

水下船体清刷机器人设计及壁面行走控制研究的任务书.docx
水下船体清刷机器人设计及壁面行走控制研究的任务书任务书一、任务背景随着人类对海洋资源的需求不断增加,水下运行设备的需求也随之增加。但是,在长期的水下运行过程中,船体壁面会因为原藻生长、海水的冲刷、以及海洋生物的附着而产生各种各样的污染,这不但会影响到水下设备的使用寿命,还会导致水下设备的能效降低。为了保证水下设备长时间的有效使用,水下船体清刷机器人应运而生。二、任务目标本次任务的主要目标是设计并制造一款水下船体清刷机器人,能够在船体壁面自由行走,并对船体壁面进行清洗。同时,机器人需要具有自主导航、避障等功
船体清刷监测水下机器人用行走装置.pdf
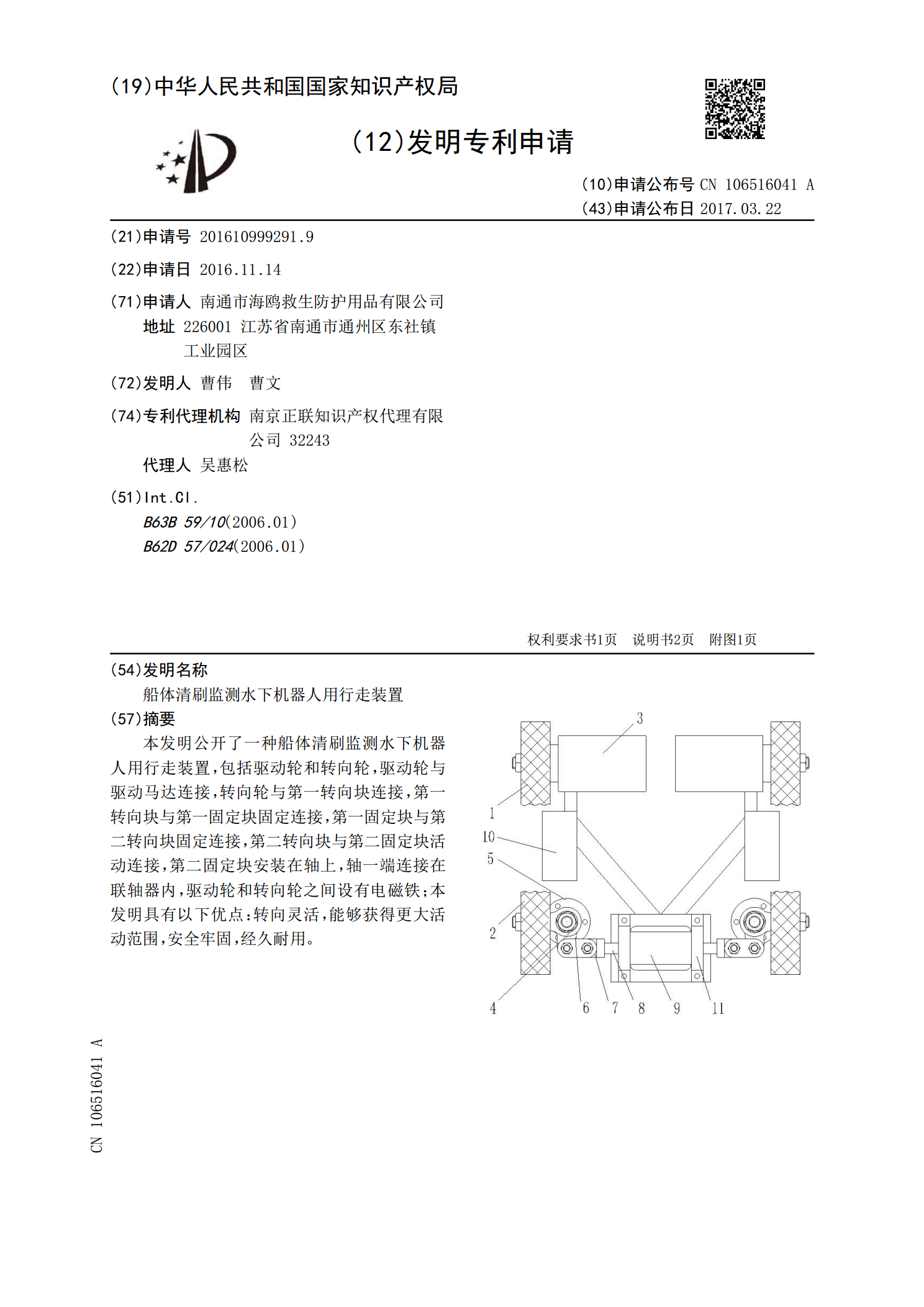
本发明公开了一种船体清刷监测水下机器人用行走装置,包括驱动轮和转向轮,驱动轮与驱动马达连接,转向轮与第一转向块连接,第一转向块与第一固定块固定连接,第一固定块与第二转向块固定连接,第二转向块与第二固定块活动连接,第二固定块安装在轴上,轴一端连接在联轴器内,驱动轮和转向轮之间设有电磁铁;本发明具有以下优点:转向灵活,能够获得更大活动范围,安全牢固,经久耐用。

水下船体清刷机器人磁吸附机构的设计与研究.docx
水下船体清刷机器人磁吸附机构的设计与研究引言船舶的船体清洗一直是一个繁琐而困难的任务。传统的清洗方式使用人工进行,存在安全问题和效率低下等诸多问题。因此,开发一种可靠的自动清洗机器人是有必要的。本文将介绍一种水下船体清刷机器人,该机器人具有磁吸附机构,从而实现了对船体的快速、有效、安全的机器人清洗。1.研究背景船舶是人类重要的交通工具之一,船体清洗是日常维护和清洁的一个关键环节。传统的清洗方式使用人工进行,这种方式不仅效率低下,而且存在极大的安全隐患,如发生溺水事故等。因此,自动化技术在船体清洗中的应用也