
基于微振镜结构光投射器的机器人抓取.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于微振镜结构光投射器的机器人抓取.docx
基于微振镜结构光投射器的机器人抓取摘要:在机器人控制方面,抓取任务一直是一个具有挑战性的课题。为了提高机器人的抓取精度和可靠性,本文提出了一种基于微振镜结构的光投射器的机器人抓取方法。该方法通过使用光投射器将激光点云投射到对象表面上,从而获得对象表面的三维形状。机器人可以使用这些数据进行抓取计划和后续的操作。试验结果表明,该方法可以有效提高机器人的抓取精度和可靠性,并且具有广阔的应用前景。Introduction:机器人的抓取任务一直是计算机视觉和机器学习等领域中一个具有挑战性的问题。在许多应用中,机器人

基于微振镜结构光投射器的机器人抓取.docx
基于微振镜结构光投射器的机器人抓取摘要机器人在工业和家庭中的应用越来越广泛,机器人抓取技术是其中的一个重要技术。本文提出一种基于微振镜结构光投射器的机器人抓取方法,该方法借助结构光投射器进行物体三维重建,以提高机器人抓取的准确性和稳定性。本文介绍了该方法的原理和实现方式,并通过实验验证了该方法的可行性和有效性。关键词:机器人抓取、微振镜、结构光投射器、三维重建1.引言机器人的应用越来越广泛,不仅在工业领域,而且在家庭、医疗等领域也得到了广泛应用。机器人抓取技术是机器人应用中的重要技术之一。机器人抓取技术的

结构光发生器及结构光投射器.pdf
本发明公开一种结构光发生器及结构光投射器,其中,结构光发生器,包括:掩膜版,设有图案层,所述图案层具有透光部分和不透光部分;光板组件,包括有第一表面和第二表面,且所述第一表面和第二表面均设有反射层,用于反射被所述图案层的不透光部分反射进入所述光板组件的红外光,所述掩膜版设于所述光板组件背离所述第一表面的一端。本发明技术方案提出的结构光发生器能够提高光源的能量利用率。
基于图像内容的投射结构光方法、深度检测方法及结构光投射装置.pdf
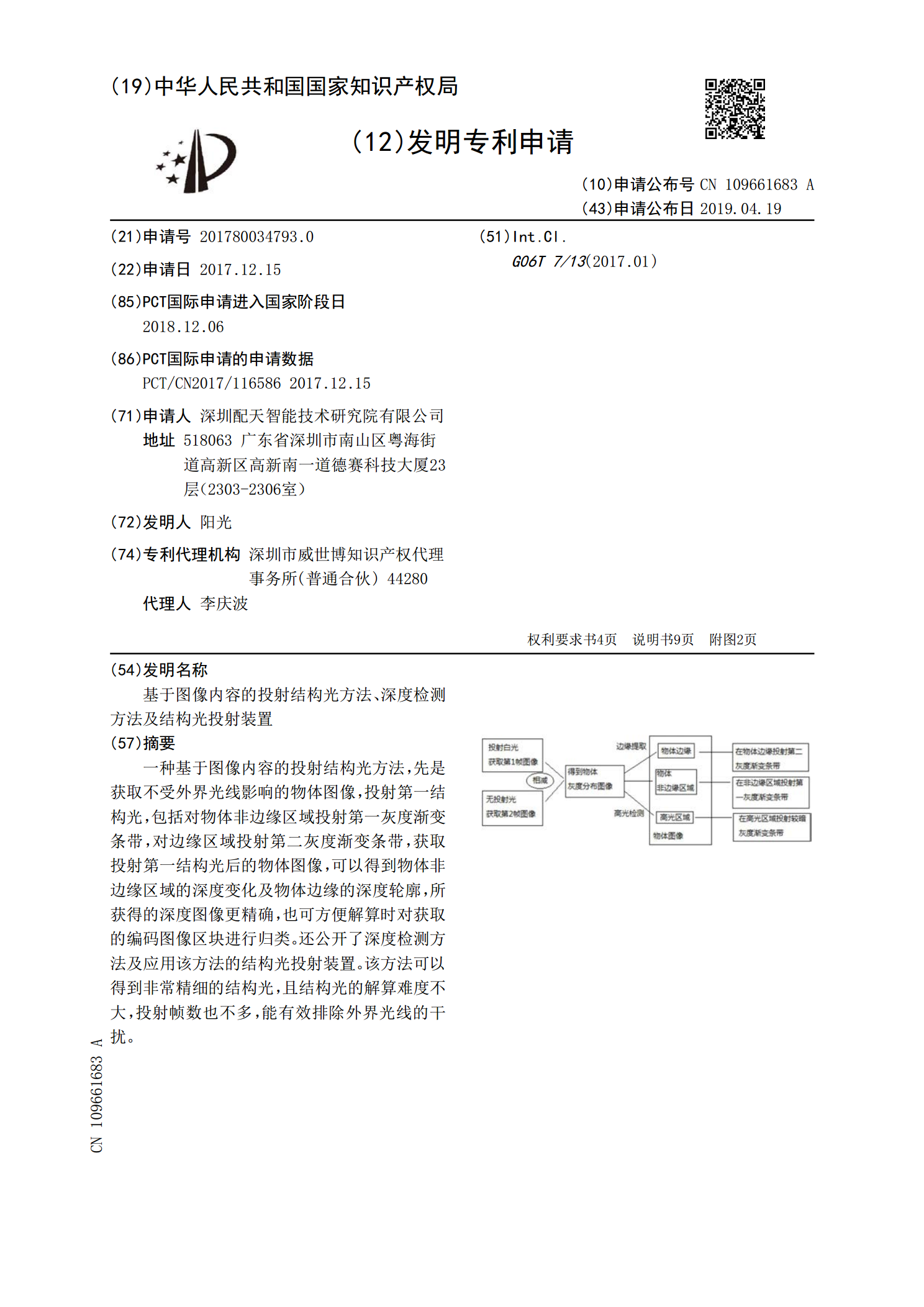
一种基于图像内容的投射结构光方法,先是获取不受外界光线影响的物体图像,投射第一结构光,包括对物体非边缘区域投射第一灰度渐变条带,对边缘区域投射第二灰度渐变条带,获取投射第一结构光后的物体图像,可以得到物体非边缘区域的深度变化及物体边缘的深度轮廓,所获得的深度图像更精确,也可方便解算时对获取的编码图像区块进行归类。还公开了深度检测方法及应用该方法的结构光投射装置。该方法可以得到非常精细的结构光,且结构光的解算难度不大,投射帧数也不多,能有效排除外界光线的干扰。

散斑投射器和结构光深度相机.pdf
本申请实施例涉及机器视觉技术领域,公开了一种散斑投射器和结构光深度相机,该散斑投射器包括:壳体、第一VCSEL、第二VCSEL、准直镜、以及DOE,准直镜相对于第二VCSEL对焦,准直镜相对于第一VCSEL失焦;第一VCSEL发射出的第一光束经准直镜和DOE后,泛光投射至外界;第二VCSEL发射出的第二光束经准直镜和DOE后,点阵投射至外界,散斑投射器用于在收到第一控制信号的情况下开启第一VCSEL并关闭第二VCSEL,还用于在收到第二控制信号的情况下开启第二VCSEL并关闭第一VCSEL,从而在不增加体