
基于激光传感器的变电站巡检机器人导航.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于激光传感器的变电站巡检机器人导航.docx
基于激光传感器的变电站巡检机器人导航基于激光传感器的变电站巡检机器人导航摘要:变电站是现代电力系统的核心设施之一,对其安全和稳定运行具有重要意义。然而,传统的人工巡检方式存在一些问题,如工作强度大、效率低下和风险高等。为了解决这些问题,本论文提出了基于激光传感器的变电站巡检机器人导航系统。该系统利用激光传感器实时获取环境数据,并通过算法分析、处理和决策,实现机器人的自主导航和避障功能。实验结果表明,该系统具有较高的定位精度和运动稳定性,能够有效地应对复杂环境下的巡检任务。关键词:变电站;巡检机器人;激光传

基于激光点云数据的变电站巡检机器人导航方法研究.docx
基于激光点云数据的变电站巡检机器人导航方法研究摘要:随着电力行业技术的发展,机器人已成为现代电网巡检的重要工具之一,能够有效提高巡检效率和减轻人工劳动强度。本文以变电站为例,研究基于激光点云数据的巡检机器人导航方法。首先对机器人导航系统的基本组成和工作原理进行了介绍。接着对激光点云数据的获取和处理进行了详细阐述,并介绍了一种局部地图构建方法。最后通过仿真实验验证了该机器人导航方法的可行性和有效性。关键词:机器人导航;激光点云数据;变电站;局部地图;仿真实验Abstract:Withthedevelopme

基于激光雷达的巡检机器人导航系统研究.docx
基于激光雷达的巡检机器人导航系统研究基于激光雷达的巡检机器人导航系统研究摘要:当前,巡检机器人已经成为现代工业生产中的重要装备,能够为企业带来诸多的好处。有效的导航是巡检机器人正常工作的关键因素之一。本文基于激光雷达,探究如何构建一种安全、高效、精准的导航系统,以实现巡检机器人在复杂环境中的智能导航和安全运行。关键词:巡检机器人,激光雷达,导航系统,智能导航,安全运行一、引言巡检机器人是一种正在迅速发展的智能化设备,在工业生产和日常生活中具有广泛的应用。如何实现机器人的智能导航和安全运行是巡检机器人领域的
变电站智能巡检机器人环境地图激光定位导航装置及方法.pdf
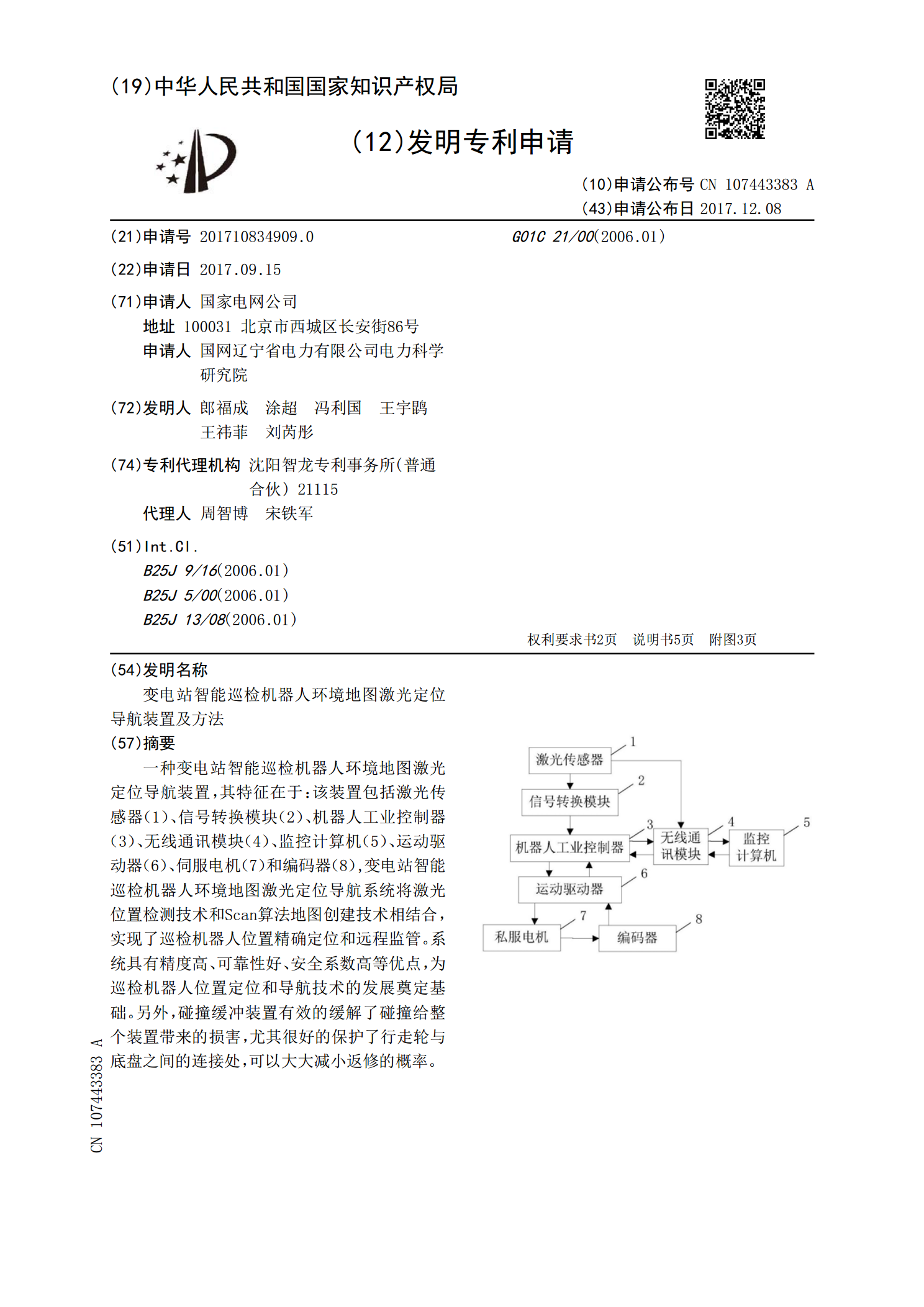
一种变电站智能巡检机器人环境地图激光定位导航装置,其特征在于:该装置包括激光传感器(1)、信号转换模块(2)、机器人工业控制器(3)、无线通讯模块(4)、监控计算机(5)、运动驱动器(6)、伺服电机(7)和编码器(8),变电站智能巡检机器人环境地图激光定位导航系统将激光位置检测技术和Scan算法地图创建技术相结合,实现了巡检机器人位置精确定位和远程监管。系统具有精度高、可靠性好、安全系数高等优点,为巡检机器人位置定位和导航技术的发展奠定基础。另外,碰撞缓冲装置有效的缓解了碰撞给整个装置带来的损害,尤其很好

基于模糊逻辑控制的变电站巡检机器人视觉导航方法.docx
基于模糊逻辑控制的变电站巡检机器人视觉导航方法摘要:随着智能机器人技术的发展,变电站巡检机器人的应用已经逐渐成为现实。然而,变电站环境复杂,存在大量的障碍物和复杂的视觉场景,传统的导航方法在变电站环境中应用效果不佳。为了解决这一问题,本文提出一种基于模糊逻辑控制的变电站巡检机器人视觉导航方法,通过将模糊逻辑控制与计算机视觉技术相结合,实现机器人在变电站环境中的智能导航。本文首先介绍了变电站巡检机器人的应用背景,然后详细介绍了模糊逻辑控制和计算机视觉技术的原理和方法。接下来,本文提出了基于模糊逻辑控制的变电