
变电站智能巡检机器人环境地图激光定位导航装置及方法.pdf

是雁****找我


1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
变电站智能巡检机器人环境地图激光定位导航装置及方法.pdf
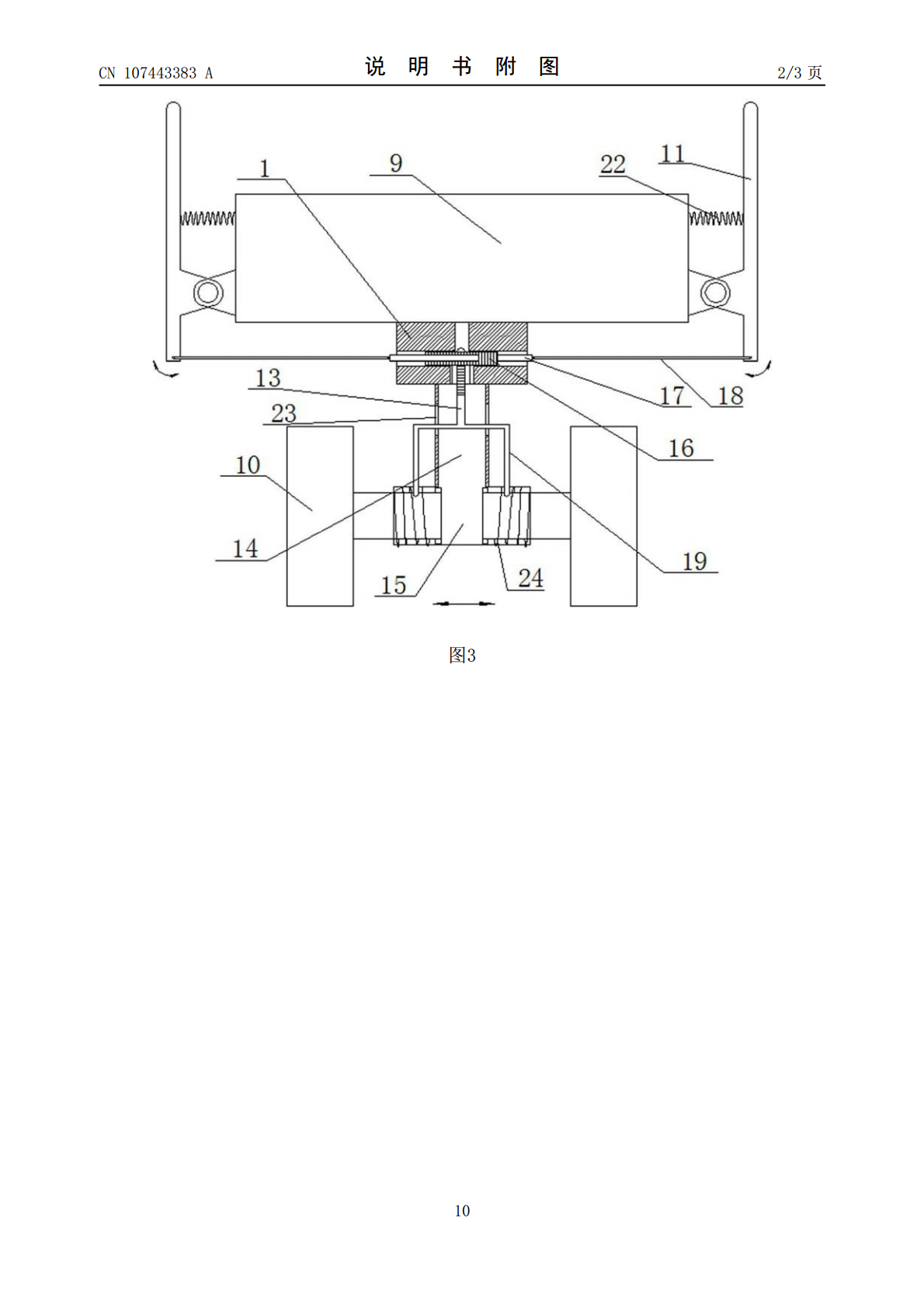
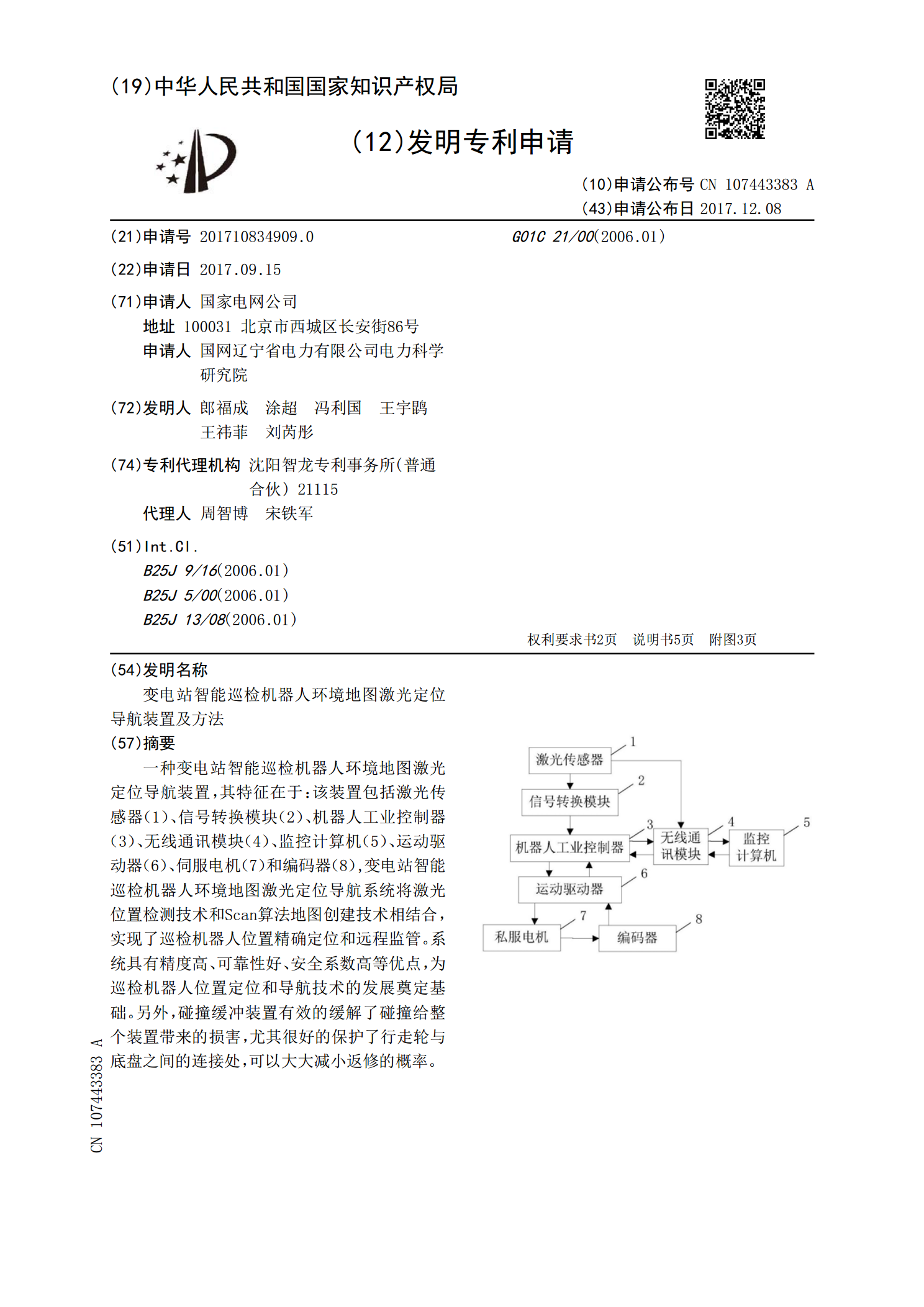
一种变电站智能巡检机器人环境地图激光定位导航装置,其特征在于:该装置包括激光传感器(1)、信号转换模块(2)、机器人工业控制器(3)、无线通讯模块(4)、监控计算机(5)、运动驱动器(6)、伺服电机(7)和编码器(8),变电站智能巡检机器人环境地图激光定位导航系统将激光位置检测技术和Scan算法地图创建技术相结合,实现了巡检机器人位置精确定位和远程监管。系统具有精度高、可靠性好、安全系数高等优点,为巡检机器人位置定位和导航技术的发展奠定基础。另外,碰撞缓冲装置有效的缓解了碰撞给整个装置带来的损害,尤其很好

变电站智能巡检机器人导航定位技术设计.docx
变电站智能巡检机器人导航定位技术设计一、简介近年来,随着人们对电力设备的可靠性、安全性和运行效率的要求越来越高,电力行业智能化建设也越来越受到重视。智能巡检机器人作为电力变电站的智能化建设之一,可以实现自主巡检、数据采集、缺陷诊断等功能,有望实现高效、低成本的电力设备维护。本文主要介绍变电站智能巡检机器人导航定位技术的设计。二、技术原理变电站智能巡检机器人导航定位技术主要包括两个方面:定位技术和导航技术。下面分别进行介绍:1.定位技术(1)惯性导航技术:通过三轴加速度计和三轴陀螺仪等器件来实现机器人的姿态
变电站巡检机器人定位方法及定位装置.pdf
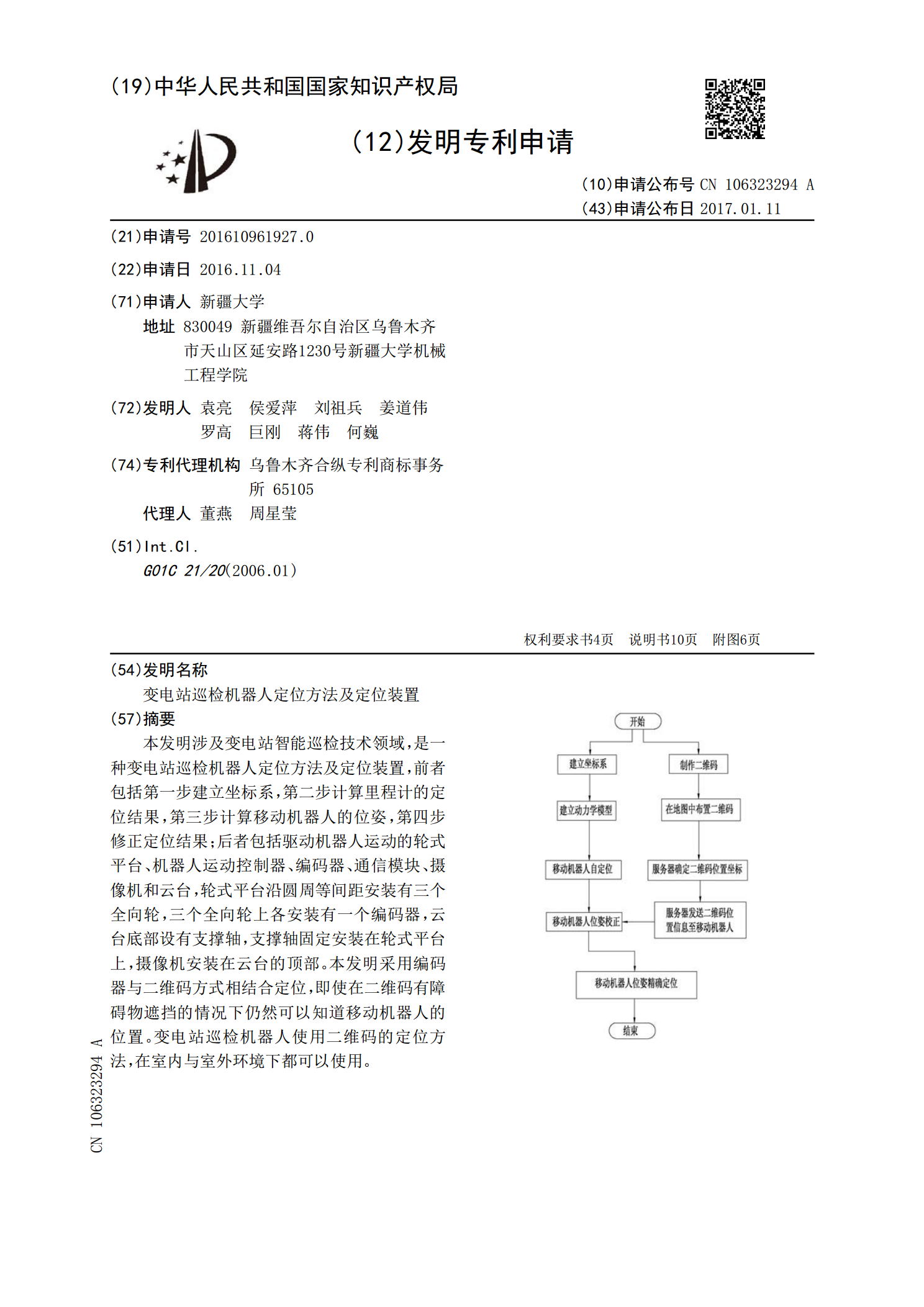
本发明涉及变电站智能巡检技术领域,是一种变电站巡检机器人定位方法及定位装置,前者包括第一步建立坐标系,第二步计算里程计的定位结果,第三步计算移动机器人的位姿,第四步修正定位结果;后者包括驱动机器人运动的轮式平台、机器人运动控制器、编码器、通信模块、摄像机和云台,轮式平台沿圆周等间距安装有三个全向轮,三个全向轮上各安装有一个编码器,云台底部设有支撑轴,支撑轴固定安装在轮式平台上,摄像机安装在云台的顶部。本发明采用编码器与二维码方式相结合定位,即使在二维码有障碍物遮挡的情况下仍然可以知道移动机器人的位置。变电

基于激光点云数据的变电站巡检机器人导航方法研究.docx
基于激光点云数据的变电站巡检机器人导航方法研究摘要:随着电力行业技术的发展,机器人已成为现代电网巡检的重要工具之一,能够有效提高巡检效率和减轻人工劳动强度。本文以变电站为例,研究基于激光点云数据的巡检机器人导航方法。首先对机器人导航系统的基本组成和工作原理进行了介绍。接着对激光点云数据的获取和处理进行了详细阐述,并介绍了一种局部地图构建方法。最后通过仿真实验验证了该机器人导航方法的可行性和有效性。关键词:机器人导航;激光点云数据;变电站;局部地图;仿真实验Abstract:Withthedevelopme

变电站巡检机器人定位与导航的应用研究.docx
变电站巡检机器人定位与导航的应用研究论文题目:变电站巡检机器人定位与导航的应用研究摘要:随着科技的不断进步,机器人技术被广泛应用于各个领域。其中,变电站巡检机器人成为电力行业中的一项重要研究领域。本论文以变电站巡检机器人的定位与导航为主题,通过深入研究相关技术和算法,希望提供一种更加高效和准确的变电站巡检机器人定位与导航方案。关键词:变电站巡检机器人,定位,导航,技术,算法1.引言变电站是电力系统中的重要环节,对电力输送和供应起着至关重要的作用。传统的变电站巡检工作存在一定的安全隐患和效率低下的问题。因此