
基于磁流变阻尼器的车辆半主动悬架智能控制研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于磁流变阻尼器的车辆半主动悬架智能控制研究的任务书.docx
基于磁流变阻尼器的车辆半主动悬架智能控制研究的任务书任务书一、任务的背景与目的车辆悬挂系统对于提高乘坐舒适性、稳定性和安全性具有重要作用。传统的悬挂系统存在如减震器传递振动、悬挂刚度调整范围有限等问题。磁流变阻尼器(Magneto-Rheologicaldamper)由于其结构简单、响应速度快、可调性强等特点,成为半主动悬架系统的重要组成部分。本研究旨在基于磁流变阻尼器的车辆半主动悬架智能控制,通过优化控制策略和参数设置,提高车辆悬挂系统的性能指标,进一步提升乘坐舒适性、稳定性和安全性。二、研究内容与任务

基于磁流变阻尼器的车辆半主动悬架智能控制研究的综述报告.docx
基于磁流变阻尼器的车辆半主动悬架智能控制研究的综述报告随着人们对于车辆乘坐舒适性和安全性越来越重视,车辆悬挂系统的研究也变得愈发重要。在悬挂系统的研究中,半主动悬挂系统由于具有较好的安全性和乘坐舒适性而备受关注。而磁流变阻尼器是一种常用于半主动悬挂系统的元件,本文将以此为基础,对于车辆半主动悬挂智能控制的研究进行综述。磁流变阻尼器(Magnetorheological(MR)Damper)是一种将流变性体作为阻尼剂的阻尼器。MR阻尼器能够通过改变电磁场的强度来调整阻尼器内部流变材料颗粒的排布,从而控制车辆
基于磁流变阻尼器的车辆悬架半主动控制研究_建模与直接.pdf
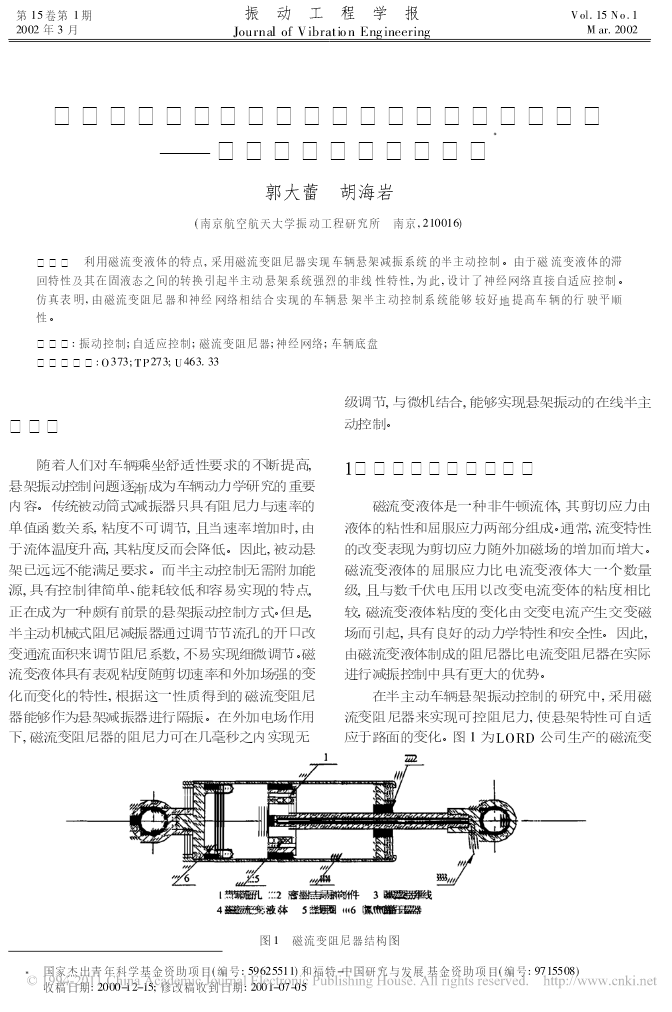
第15卷第1期振动工程学报Vol.15No.12002年3月JournalofVibrationEngineeringMar.2002基于磁流变阻尼器的车辆悬架半主动控制研究——建模与直接自适应控制�郭大蕾胡海岩(南京航空航天大学振动工程研究所南京,210016)摘要利用磁流变液体的特点,采用磁流变阻尼器实现车辆悬架减振系统的半主动控制。由于磁流变液体的滞回特性及其在固液态之间的转换引起半主动悬架系统强烈的非线性特性,为此,设计了神经网络直接自适应控制。仿真表明,由磁流变阻尼器和神经网络相结合实现的车辆悬

基于磁流变阻尼器的半主动车辆座椅悬架研究的任务书.docx
基于磁流变阻尼器的半主动车辆座椅悬架研究的任务书任务书任务名称:基于磁流变阻尼器的半主动车辆座椅悬架研究任务背景:随着车辆数量的不断增加和驾驶环境的不断变化,车辆悬架系统的性能越发重要。研究表明,不舒适的车辆座椅悬架会对驾驶员的健康产生负面影响,如颈部、腰部疼痛和疲劳等。因此,如何提高车辆悬架系统的性能,减轻驾驶员的疲劳感,是车辆悬架领域亟待解决的问题。任务目的:本研究旨在设计一种基于磁流变阻尼器的半主动车辆座椅悬架,以提高驾驶员的舒适性和安全性。任务内容:本研究将包括以下内容:1.分析半主动车辆座椅悬架

基于磁流变阻尼器的半主动悬架控制策略研究的任务书.docx
基于磁流变阻尼器的半主动悬架控制策略研究的任务书任务书一、任务概述随着汽车工业的快速发展,车辆的悬架系统也在不断升级。传统的机械悬架和电子悬架已经不能满足人们对于行车舒适度和安全性的需求。半主动悬架作为一种新型的悬架系统,具有良好的减震效果和能量损耗小的特点,在汽车悬架领域得到了广泛应用。半主动悬架是指悬架系统由机械弹簧、减震器和磁流变阻尼器等组成,并在减震器内部加入磁流变液体,通过改变磁场的强度和方向控制液体的黏度,从而实现对于车辆的减震控制。本次任务将基于磁流变阻尼器的半主动悬架进行控制策略的研究。二