
基于磁导航的全向AGV定位技术研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于磁导航的全向AGV定位技术研究.docx
基于磁导航的全向AGV定位技术研究一、概述全向自动导引车(AGV)是一种能够自主规划路径并自主运动的机器人系统。在现代工业生产中,机器人的应用越来越广泛,尤其是在物流配送、生产流程等方面,机器人可以极大地提高效率和质量,减少不必要的人工干预。AGV作为一种常见的移动式机器人系统,在各种工业生产中都有着广泛的应用,主要用于零部件的运输和装配,以及物流系统的自动化管理等。在AGV中,精确的定位技术是非常重要的,因为只有准确地了解机器人自身的位置和运动状态,才能实现对路径规划的准确控制。磁导航是一种常见的AGV

基于惯性导航的全向AGV定位系统研究与设计.docx
基于惯性导航的全向AGV定位系统研究与设计摘要:全向AGV(全向自动导引车)是一种能够自主实现路径规划、避障和定位等功能的智能移动机器人。而定位是全向AGV系统中的一个关键问题,直接影响着系统的导航精度和效果。本文以惯性导航技术为基础,研究和设计了一种全向AGV定位系统,通过搜集惯性传感器数据,利用卡尔曼滤波算法进行数据融合,来提高定位精度和稳定性。实验结果表明,该系统能够在复杂环境中实现准确的定位效果。关键词:全向AGV;定位;惯性导航;卡尔曼滤波算法1.引言随着自动化技术的不断发展和应用,全向AGV作

基于Kalman滤波和PD控制的磁钉定位AGV导航.docx
基于Kalman滤波和PD控制的磁钉定位AGV导航基于Kalman滤波和PD控制的磁钉定位AGV导航摘要:自主导航无人车(AGV)已经成为工业自动化领域的重要研究课题。其中,磁钉定位技术在AGV导航中起到了重要作用。本文提出了一种基于Kalman滤波和PD控制的磁钉定位AGV导航方法。该方法结合了Kalman滤波的优势,用于滤波定位误差,并通过PD控制来调整AGV的行动。实验结果表明,该方法能够有效地实现AGV导航并提高导航精度和稳定性。1.引言自主导航AGV是一种能够自主行驶、完成多种任务的无人车,广泛
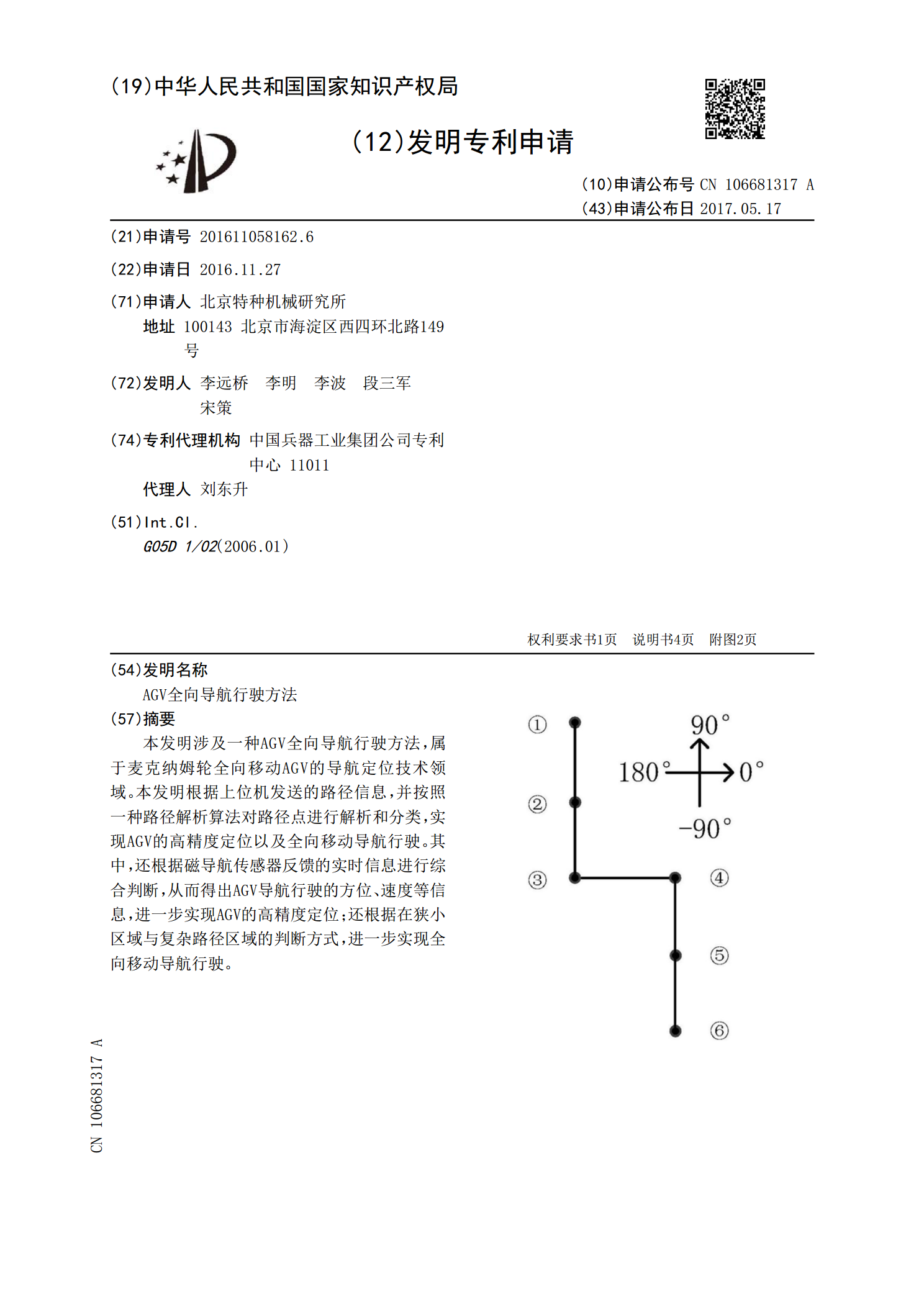
AGV全向导航行驶方法.pdf
本发明涉及一种AGV全向导航行驶方法,属于麦克纳姆轮全向移动AGV的导航定位技术领域。本发明根据上位机发送的路径信息,并按照一种路径解析算法对路径点进行解析和分类,实现AGV的高精度定位以及全向移动导航行驶。其中,还根据磁导航传感器反馈的实时信息进行综合判断,从而得出AGV导航行驶的方位、速度等信息,进一步实现AGV的高精度定位;还根据在狭小区域与复杂路径区域的判断方式,进一步实现全向移动导航行驶。
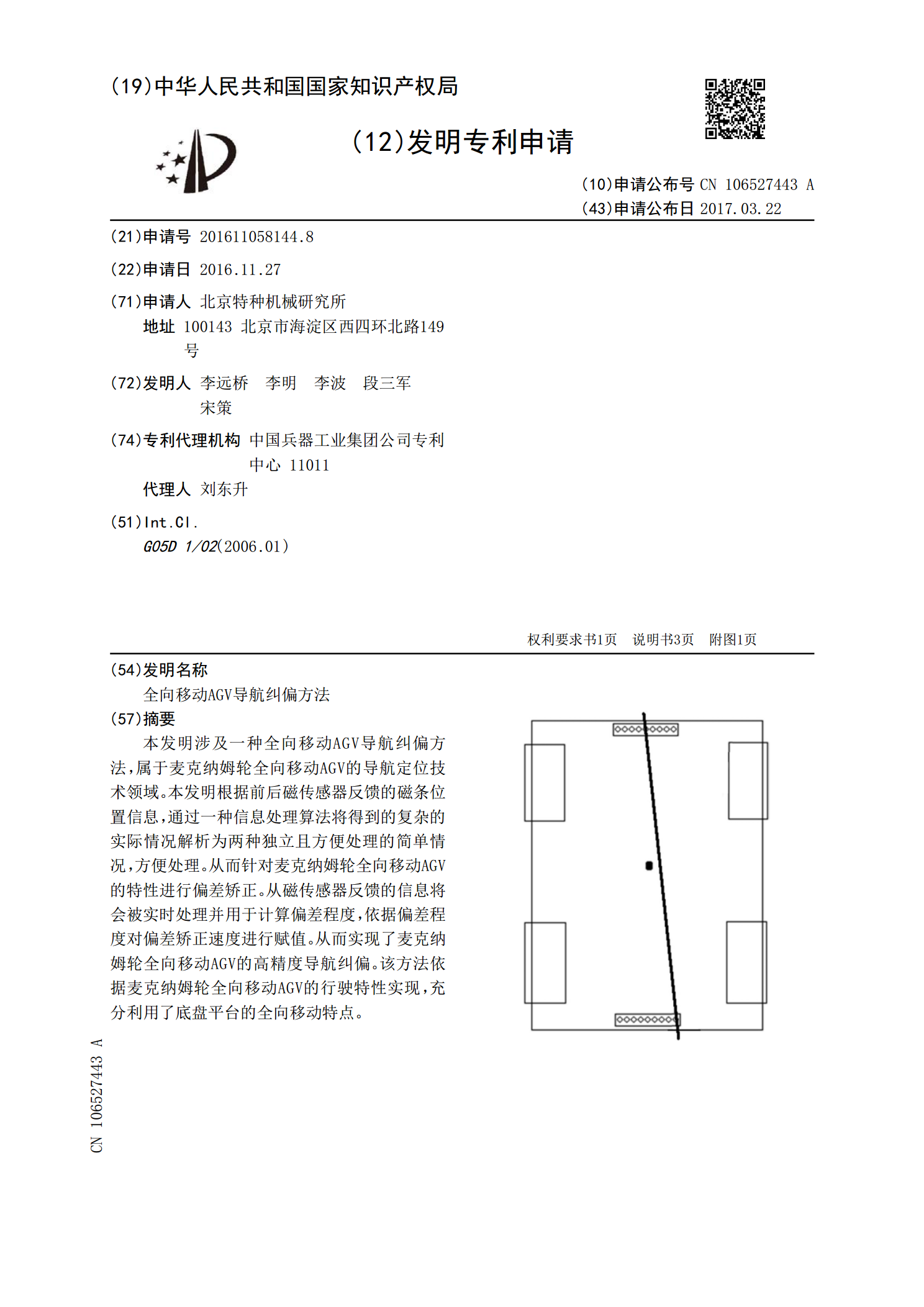
全向移动AGV导航纠偏方法.pdf
本发明涉及一种全向移动AGV导航纠偏方法,属于麦克纳姆轮全向移动AGV的导航定位技术领域。本发明根据前后磁传感器反馈的磁条位置信息,通过一种信息处理算法将得到的复杂的实际情况解析为两种独立且方便处理的简单情况,方便处理。从而针对麦克纳姆轮全向移动AGV的特性进行偏差矫正。从磁传感器反馈的信息将会被实时处理并用于计算偏差程度,依据偏差程度对偏差矫正速度进行赋值。从而实现了麦克纳姆轮全向移动AGV的高精度导航纠偏。该方法依据麦克纳姆轮全向移动AGV的行驶特性实现,充分利用了底盘平台的全向移动特点。