
基于LightGBM的车载激光点云电力线快速提取方法.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于LightGBM的车载激光点云电力线快速提取方法.docx
基于LightGBM的车载激光点云电力线快速提取方法摘要:激光点云在车载系统中被广泛应用于电力线的快速提取和识别。本论文提出了一种基于LightGBM的车载激光点云电力线快速提取方法。首先,对激光点云进行预处理,包括点云去噪和点云分割,以提取出电力线所在的点云区域。然后,通过特征提取和特征选择,将点云特征转换为有效的特征向量。接下来,使用LightGBM建立分类模型,并对点云进行分类识别,以区分出电力线和其他杂波点云。最后,对分类结果进行后处理,包括去除误检和漏检,并生成电力线的三维模型。实验结果表明,该
一种基于激光点云的电力线快速提取方法.pdf
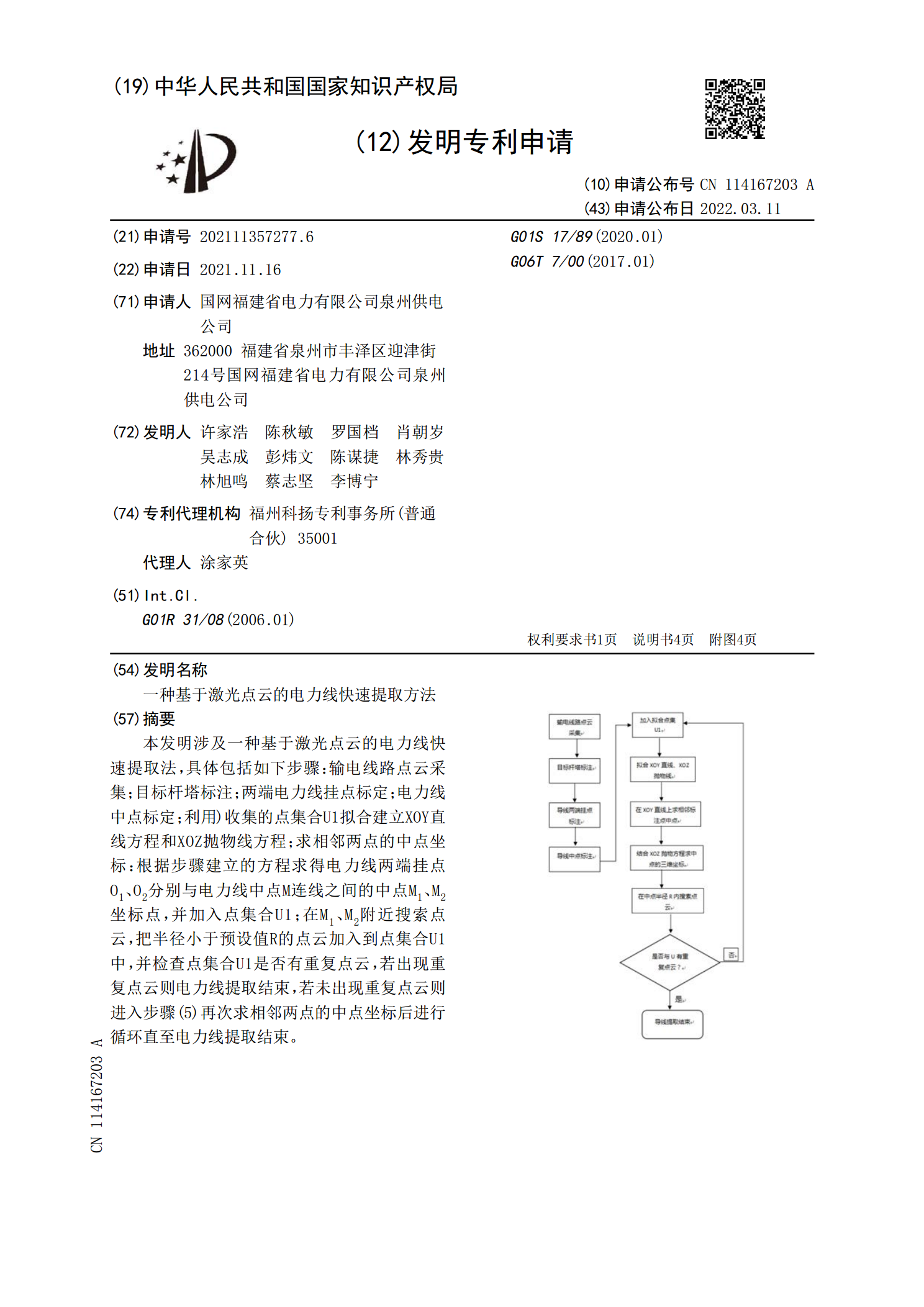
本发明涉及一种基于激光点云的电力线快速提取法,具体包括如下步骤:输电线路点云采集;目标杆塔标注;两端电力线挂点标定;电力线中点标定;利用)收集的点集合U1拟合建立XOY直线方程和XOZ抛物线方程;求相邻两点的中点坐标:根据步骤建立的方程求得电力线两端挂点O

基于车载激光点云的道路标线提取方法研究.docx
基于车载激光点云的道路标线提取方法研究基于车载激光点云的道路标线提取方法研究摘要:道路标线提取是自动驾驶和智能驾驶系统中的一个重要环节。本文针对车载激光点云数据,研究了一种道路标线提取方法。该方法首先对点云数据进行预处理,包括地面分割和点云滤波。接着,通过利用点云的几何特征和颜色特征,采用聚类算法提取道路标线。最后,通过性能评估和实验结果分析,验证了该方法的有效性和可行性。本文的研究结果对于实现自动驾驶系统中的道路标线提取具有一定的指导意义。关键词:车载激光点云;道路标线;预处理;聚类算法;性能评估一、引
基于相对密度聚类的激光点云电力线提取方法.pptx
汇报人:CONTENTS添加章节标题相对密度聚类算法介绍算法基本原理算法优缺点分析算法适用场景激光点云电力线提取方法激光点云数据预处理电力线提取流程提取结果展示基于相对密度聚类的电力线提取方法聚类算法在电力线提取中的应用聚类参数的选择与优化聚类结果评估与改进实验验证与结果分析实验数据集介绍实验环境与实现细节实验结果展示与分析结果对比与讨论结论与展望本文工作总结方法局限性分析未来研究方向汇报人:

一种基于机载激光点云的电力线提取方法.docx
一种基于机载激光点云的电力线提取方法Title:AMethodforPowerLineExtractionBasedonAirborneLiDARPointCloudAbstract:Asthedemandforenergycontinuestogrow,theaccurateidentificationandmappingofpowerlinesisbecomingincreasinglyimportantforensuringthereliablesupplyofelectricityandmaint