
基于GNSS和INS的磁浮列车组合测速定位理论研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于GNSS和INS的磁浮列车组合测速定位理论研究.docx
基于GNSS和INS的磁浮列车组合测速定位理论研究基于GNSS和INS的磁浮列车组合测速定位理论研究摘要随着城市交通需求的不断增长,磁浮列车作为一种高速、无摩擦、无振动的交通工具,受到了越来越多的关注。为了保证磁浮列车的运行安全和准确性,准确的测速定位是非常重要的。本文提出了一种基于GNSS(全球导航卫星系统)和INS(惯性导航系统)的磁浮列车组合测速定位理论。通过结合两种系统的优点,能够提高磁浮列车的测速定位精度和稳定性。关键词:磁浮列车;GNSS;INS;测速定位1.引言磁浮列车作为一种新兴的高速交通

基于GNSS的高速列车组合定位模型.docx
基于GNSS的高速列车组合定位模型基于GNSS的高速列车组合定位模型摘要:随着高速列车的发展,对列车定位精度、可靠性和安全性的要求越来越高。传统的单一定位技术无法满足高速列车的需求,因此需要使用多种定位技术进行组合定位。GNSS是一种广泛应用于定位领域的技术,具有全球覆盖、定位精度高等优势。本文基于GNSS技术,提出了一种高速列车组合定位模型,该模型通过将GNSS与惯性传感器的测量结果进行组合,实现高精度、高可靠性的列车定位。关键词:高速列车;组合定位;GNSS;惯性传感器1.引言高速列车作为现代交通运输

基于北斗—INS组合的铁路站场列车定位方法研究.docx
基于北斗—INS组合的铁路站场列车定位方法研究导读:本文围绕着基于北斗-INS组合的铁路站场列车定位方法展开研究,介绍了车载北斗与惯性导航系统、组合导航算法、定位精度评价等方面的理论知识,并阐述了研究的意义、现有研究成果以及未来研究方向。通过对相关领域的分析和总结,说明该研究在智慧城市建设中具有重要的应用价值。一、研究背景和意义随着铁路交通的发展,对列车定位的精度要求也越来越高,这一问题已逐渐成为铁路运输领域的研究热点。在传统的铁路车辆定位方法中,常用的技术手段包括铁轨电路、GPS以及基站信号等。但是这些
一种基于不变滤波的GNSS、INS和视觉紧组合导航定位方法.pdf
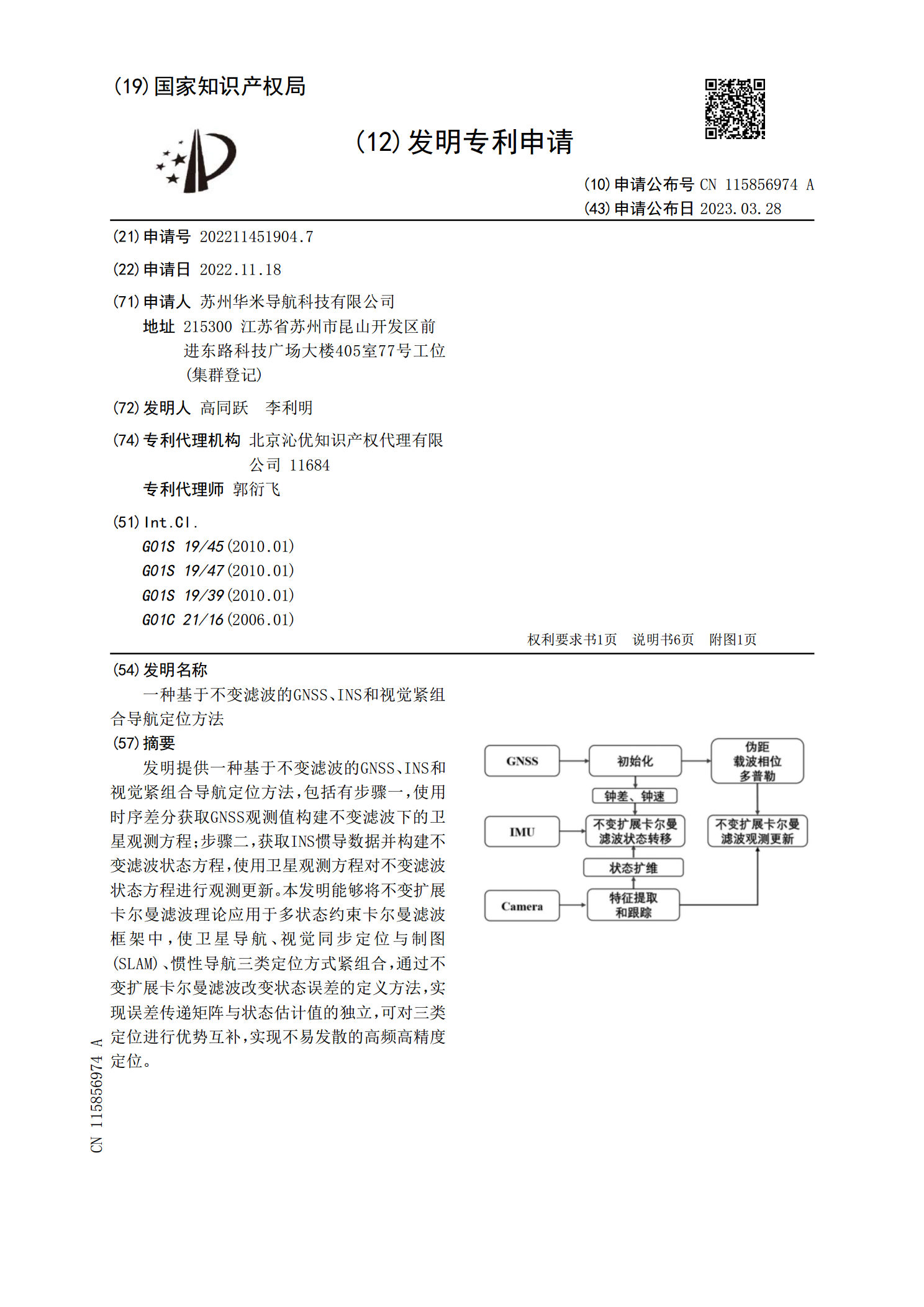
发明提供一种基于不变滤波的GNSS、INS和视觉紧组合导航定位方法,包括有步骤一,使用时序差分获取GNSS观测值构建不变滤波下的卫星观测方程;步骤二,获取INS惯导数据并构建不变滤波状态方程,使用卫星观测方程对不变滤波状态方程进行观测更新。本发明能够将不变扩展卡尔曼滤波理论应用于多状态约束卡尔曼滤波框架中,使卫星导航、视觉同步定位与制图(SLAM)、惯性导航三类定位方式紧组合,通过不变扩展卡尔曼滤波改变状态误差的定义方法,实现误差传递矩阵与状态估计值的独立,可对三类定位进行优势互补,实现不易发散的高频高精

基于GNSS和地面基站的组合式导航精确测速定位方法及系统.pdf
本发明公开了基于GNSS和地面基站的组合式导航精确测速定位方法及系统,步骤100、获取车辆进入盲区前的初始位置,步骤200、获得车辆坐标和航向角,在车辆驶入GNSS盲区后的第一个采样时刻,利用多重权值地图匹配算法计算得到车辆在盲区中的坐标和航向角,步骤300、获得当前车辆的速度和横摆角速度,步骤400、根据获得的车辆参数判断车辆是否在GNSS盲区中,步骤500、获取下一时刻车辆位置坐标以及航向角,本发明改进了现有的GNSS点方位角匹配算法,使用前后定位点连线与路段夹角、定位点与路段投影距离和航向角与路段夹