
关节式履带机器人越障性能分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

关节式履带机器人越障性能分析.docx
关节式履带机器人越障性能分析关节式履带机器人越障性能分析摘要:随着机器人技术的不断发展,越障性能已成为判断机器人性能的重要指标之一。本文主要针对关节式履带机器人的越障性能进行了分析和讨论。文章首先介绍了关节式履带机器人的基本结构和工作原理,然后详细分析了影响机器人越障性能的关键因素,包括机器人的灵活性和稳定性、关节的运动范围和控制方式等。接着,本文提出了优化关节式履带机器人越障性能的方法和措施,包括改进机器人的关节设计、优化机器人的控制算法等。最后,通过实验验证了所提出方法的有效性,并对未来发展进行了展望

基于行星轮机构履带式煤矿侦察机器人越障性能分析.docx
基于行星轮机构履带式煤矿侦察机器人越障性能分析基于行星轮机构履带式煤矿侦察机器人越障性能分析摘要:近年来,随着煤矿安全问题的日益突出,机器人技术在煤矿勘察和侦察方面的应用越来越受到关注。履带式机器人作为一种具有良好越障能力的移动平台,被广泛应用于煤矿环境中。行星轮机构作为履带式机器人的核心组成部分,对机器人的越障性能具有重要影响。本论文将分析行星轮机构对履带式煤矿侦察机器人越障性能的影响,以期为煤矿机器人的设计和优化提供理论依据。一、介绍1.1煤矿机器人的背景和研究意义1.2履带式机器人在煤矿中的应用1.
履带式行走装置及越障机器人.pdf
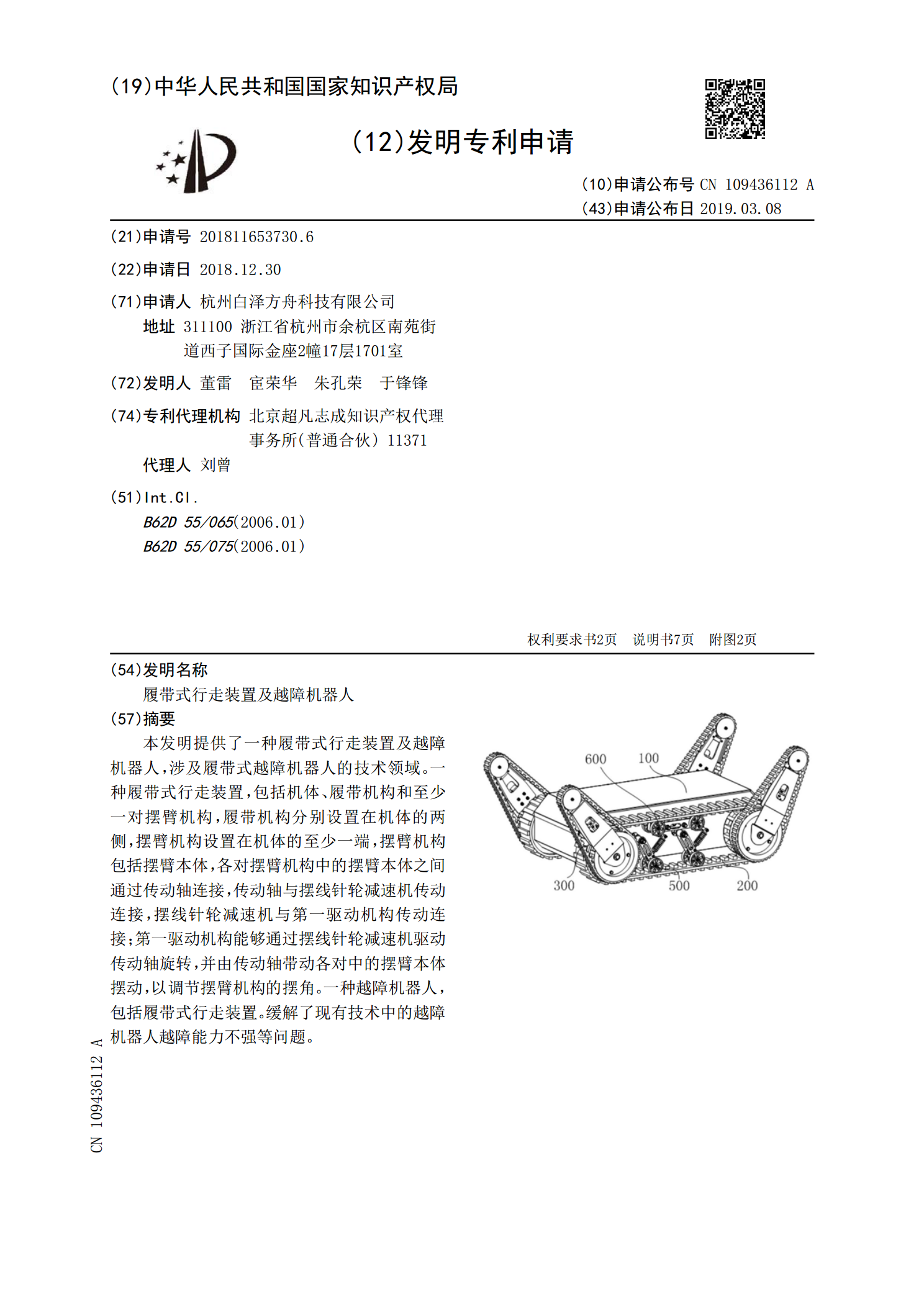
本发明提供了一种履带式行走装置及越障机器人,涉及履带式越障机器人的技术领域。一种履带式行走装置,包括机体、履带机构和至少一对摆臂机构,履带机构分别设置在机体的两侧,摆臂机构设置在机体的至少一端,摆臂机构包括摆臂本体,各对摆臂机构中的摆臂本体之间通过传动轴连接,传动轴与摆线针轮减速机传动连接,摆线针轮减速机与第一驱动机构传动连接;第一驱动机构能够通过摆线针轮减速机驱动传动轴旋转,并由传动轴带动各对中的摆臂本体摆动,以调节摆臂机构的摆角。一种越障机器人,包括履带式行走装置。缓解了现有技术中的越障机器人越障能力

一种履带式机器人设计及其越障分析.docx
一种履带式机器人设计及其越障分析履带式机器人是一种具有履带轮的机器人,它通过履带轮的转动来实现移动和越障功能。履带式机器人设计的关键是结构设计和越障功能的分析。首先,履带式机器人的结构设计是实现其功能的基础。履带式机器人通常由车体、履带轮、履带链和电机等部分组成。车体是机器人的主体结构,承载和连接其他部件。履带轮是支撑和驱动机器人行走的关键组件,它通过电机的驱动来带动履带链的运动。履带链由一系列链接而成的链环组成,它紧贴着地面,具有良好的摩擦力和抓地力。电机是履带式机器人的动力来源,通过控制电机的转速和方

履带喷雾车软路面越障性能分析.docx
履带喷雾车软路面越障性能分析履带喷雾车是一种用于在道路、建筑及其他设施上进行喷雾作业的专用车辆。它具有软路面越障性能,在恶劣环境下仍能稳定工作。本文将对履带喷雾车的软路面越障性能进行分析。一、履带喷雾车的软路面越障设计履带喷雾车的软路面越障设计是通过调整车辆的结构、性能等方面来实现的。一般情况下,它们会采用高强度合金钢和其他优质材料制作。此外,该车辆还采用了先进的液压系统和智能控制系统,以确保在软路面越障时稳定可靠的工作。二、履带喷雾车软路面越障性能测试为了测试履带喷雾车的软路面越障性能,设计了一系列针对