
侧刮取料机定位控制功能的设计优化.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

侧刮取料机定位控制功能的设计优化.docx
侧刮取料机定位控制功能的设计优化标题:侧刮取料机定位控制功能的设计优化摘要:随着现代生产制造的发展和需求的增加,侧刮取料机在清洁自动化过程中扮演着重要角色。侧刮取料机的定位控制功能对于提高工作效率和减少人力成本具有重要意义。本文通过分析侧刮取料机定位控制功能的现状和存在的问题,探讨了如何进行优化设计。通过改进传感器技术、优化控制算法和整合智能化技术,能够实现更精准的定位控制,提高侧刮取料机的工作效率和稳定性。关键词:侧刮取料机;定位控制;优化设计;传感器技术;控制算法;智能化技术一、引言侧刮取料机作为一种
刮取装置及自动上料机.pdf
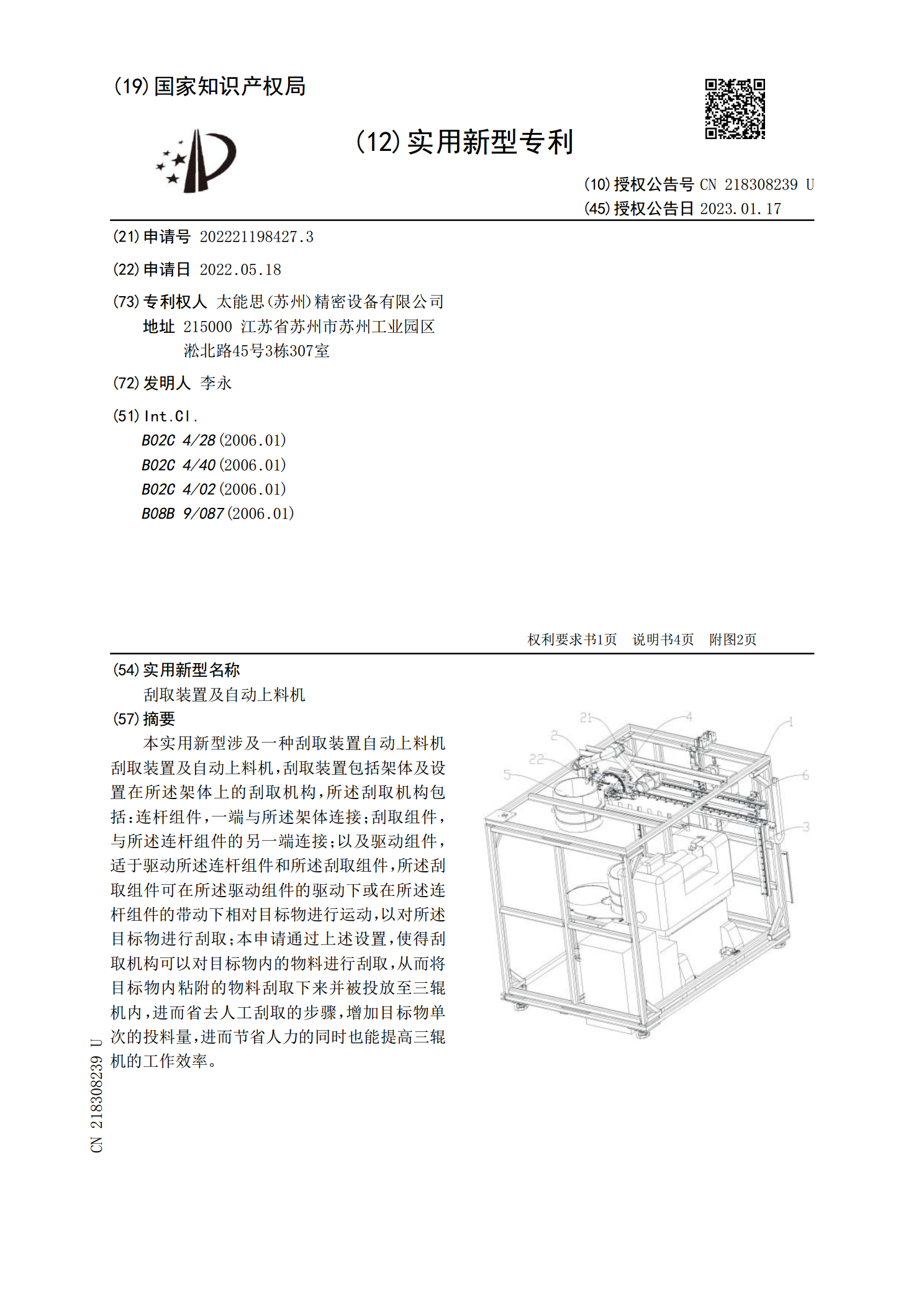
本实用新型涉及一种刮取装置自动上料机刮取装置及自动上料机,刮取装置包括架体及设置在所述架体上的刮取机构,所述刮取机构包括:连杆组件,一端与所述架体连接;刮取组件,与所述连杆组件的另一端连接;以及驱动组件,适于驱动所述连杆组件和所述刮取组件,所述刮取组件可在所述驱动组件的驱动下或在所述连杆组件的带动下相对目标物进行运动,以对所述目标物进行刮取;本申请通过上述设置,使得刮取机构可以对目标物内的物料进行刮取,从而将目标物内粘附的物料刮取下来并被投放至三辊机内,进而省去人工刮取的步骤,增加目标物单次的投料量,进而

浅谈侧式悬臂堆料机桥式斗轮取料机控制系统的设计.pdf
浅谈侧式悬臂堆料机桥式斗轮取料机控制系统的设计文章介绍了侧式悬臂堆料机桥式斗轮取料机的基本控制理论,以及西门子有源底板、西门子工业以太网、西门子PROFIBUS-DP、光纤通讯等的应用。标签:控制理论;PLC;工业以太网1堆取料机控制系统现状1.1堆取料机的特点侧式悬臂堆料机桥式斗轮取料机具有占地面积小,物料贮量大等优点是现今应用最广泛的均化设备,在港口、码头、大型电厂、水泥厂、矿山都可以见到它的影子。随着科学技术的不断发展,PLC功能日渐强大,网络通讯功能的应用,使功能控制更加集中,监测能力更加完备,侧

侧式悬臂堆料机侧式刮板取料机安装.docx
目录1说明···················································································································································12设备用途·································································································

取料机自动控制系统设计优化.docx
取料机自动控制系统设计优化本文将为读者介绍取料机自动控制系统的设计和优化。首先,我们将谈谈取料机自动控制系统的基本功能,然后介绍如何使用计算机软件设计这种自动控制系统。接着,我们将讨论如何进行系统优化,以提高其性能和可靠性。取料机自动控制系统的基本功能取料机自动控制系统是一种机器人,用于从储存器中获取物品。它的基本功能是允许用户指定所需物品的位置,并控制机器人完成从储存位置到选定位置的物品转移。系统的其他主要功能包括:1.精确控制:机器人必须能够精确到达不同的位置,并能够对物品进行准确的抓取和释放。2.可