
六轴工业机器人的误差补偿方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

六轴工业机器人的误差补偿方法.docx
六轴工业机器人的误差补偿方法六轴工业机器人的误差补偿方法摘要:随着工业机器人在生产线上的应用越来越广泛,机器人的精度和重复性要求也越来越高。然而,由于各种因素,六轴工业机器人存在着一定的误差。因此,为了提高机器人的精度和稳定性,对六轴机器人的误差进行补偿是一项关键任务。本论文将介绍几种常见的六轴工业机器人误差补偿方法,并对其优缺点进行讨论。第一节:引言工业机器人在制造业的广泛应用,为生产线的自动化和高效化做出了巨大贡献。然而,由于各种因素,六轴工业机器人的精度和重复性存在误差。这些误差可能来自于机械结构的

六自由度工业机器人位姿误差的补偿方法.docx
六自由度工业机器人位姿误差的补偿方法工业机器人是非常重要的自动化设备,广泛应用于各行业中。在工业机器人的运动过程中,由于各种外界因素的影响,如工件形变等,机器人的位置和姿态可能会发生误差,这个误差如果不加以处理,会导致机器人运动不准确,影响到工作质量和生产效率。因此,如何有效地补偿机器人运动误差成为了一个重要的研究课题。六自由度的机器人位姿误差主要包括平移误差和旋转误差。其中,平移误差又可以分为X、Y、Z方向上的误差,旋转误差可分为绕X、Y、Z轴的误差。解决这些误差的方法主要包括传感器测量、误差建模和误差

工业机器人参数辨识及误差补偿方法研究.docx
工业机器人参数辨识及误差补偿方法研究随着制造业业务的不断扩展和生产制造工艺的不断升级,工业机器人在制造业领域中的应用越来越广泛。然而,在实际的工作中,由于各种因素的影响,工业机器人的精度和性能可能会出现误差,给产品的制造质量和企业的生产效率造成影响。本文将介绍工业机器人参数辨识及误差补偿方法的研究。一、工业机器人参数辨识工业机器人的参数是指机器人的运动控制参数、机械结构参数以及传感器参数等多个参数。在实际的工作中,由于各种因素的缘故,这些参数可能会出现误差,从而影响机器人的性能和精度。因此,对这些参数进行

工业机器人原点误差分析与补偿.docx
工业机器人原点误差分析与补偿工业机器人是一种自动化设备,广泛应用于工业生产中的各个环节。在工业机器人的操作过程中,其工作精度对于产品的质量和生产效率具有重要影响。而机器人的原点误差,即机器人执行动作时,不可避免地会出现的起始位置误差,会对机器人的工作精度和稳定性产生影响。机器人的原点误差主要来源于机器人系统的结构和控制精度。首先,机器人的机械结构制造精度是决定机器人工作精度的关键因素之一。例如,机器人的关节以及机械臂的连接点的加工精度会直接决定机器人在坐标系中的定位精度。其次,机器人的传感器系统的精度也是
工业机器人多源误差补偿方法、装置、设备及存储介质.pdf
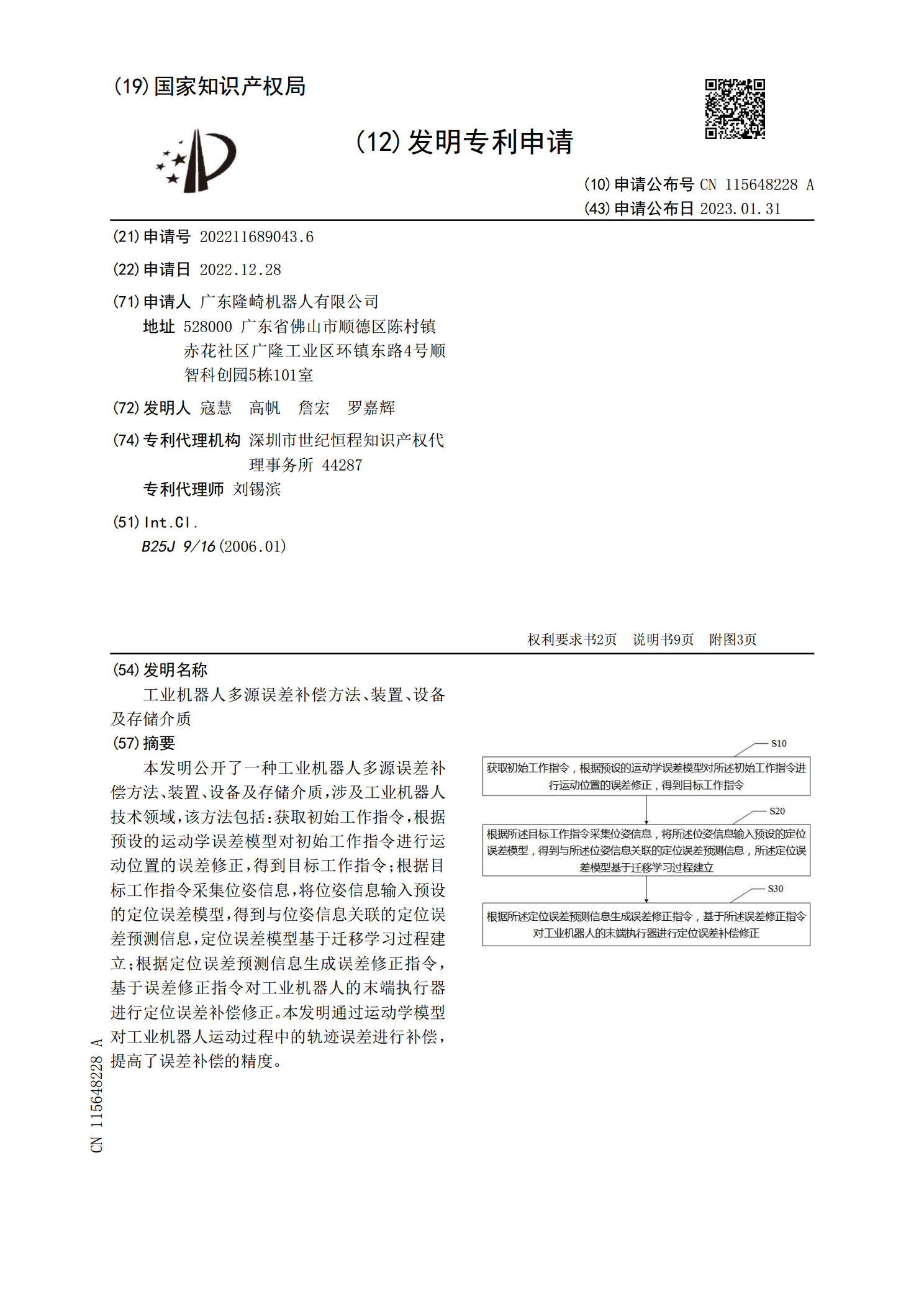
本发明公开了一种工业机器人多源误差补偿方法、装置、设备及存储介质,涉及工业机器人技术领域,该方法包括:获取初始工作指令,根据预设的运动学误差模型对初始工作指令进行运动位置的误差修正,得到目标工作指令;根据目标工作指令采集位姿信息,将位姿信息输入预设的定位误差模型,得到与位姿信息关联的定位误差预测信息,定位误差模型基于迁移学习过程建立;根据定位误差预测信息生成误差修正指令,基于误差修正指令对工业机器人的末端执行器进行定位误差补偿修正。本发明通过运动学模型对工业机器人运动过程中的轨迹误差进行补偿,提高了误差补