
一种基于张量投票的CAD模型配准方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于张量投票的CAD模型配准方法.docx
一种基于张量投票的CAD模型配准方法基于张量投票的CAD模型配准方法摘要:随着计算机辅助设计(CAD)的广泛应用,CAD模型的配准问题成为一个重要的研究领域。本文提出了一种基于张量投票的CAD模型配准方法。通过将CAD模型表示为三维张量,该方法能够在保留模型几何信息的同时,克服传统方法中由于规模缩放、旋转和平移等变换带来的配准问题。通过实验验证,本文所提出的方法在多个数据集上展示了较高的配准准确性和鲁棒性。关键词:CAD模型,配准,张量投票1.引言计算机辅助设计(CAD)在现代设计和制造过程中扮演着重要角
一种基于张量投票方法的点云配准方法.pdf
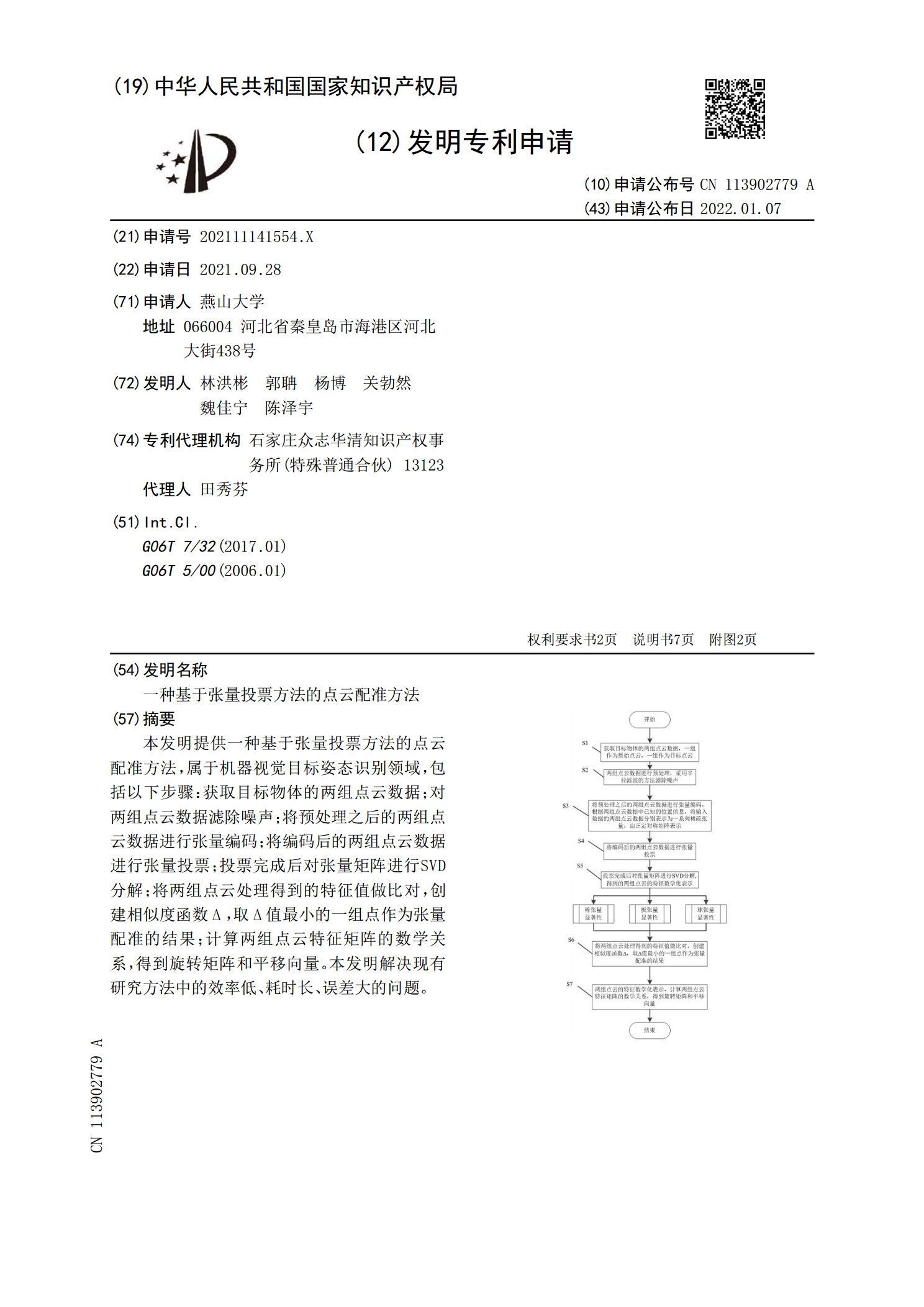
本发明提供一种基于张量投票方法的点云配准方法,属于机器视觉目标姿态识别领域,包括以下步骤:获取目标物体的两组点云数据;对两组点云数据滤除噪声;将预处理之后的两组点云数据进行张量编码;将编码后的两组点云数据进行张量投票;投票完成后对张量矩阵进行SVD分解;将两组点云处理得到的特征值做比对,创建相似度函数∆,取∆值最小的一组点作为张量配准的结果;计算两组点云特征矩阵的数学关系,得到旋转矩阵和平移向量。本发明解决现有研究方法中的效率低、耗时长、误差大的问题。

基于扩散张量图像的配准算法研究.pptx
,目录PartOnePartTwo研究背景研究意义PartThree扩散张量图像配准算法概述国内外研究现状及发展趋势PartFour研究目标与内容研究方法与技术路线实验设计与数据采集PartFive扩散张量图像配准算法原理算法流程与关键技术算法实现与优化PartSix实验结果展示结果分析算法性能评估与对比分析PartSeven研究结论研究创新点与贡献研究不足与展望THANKS

基于扩散张量图像的配准算法研究.docx
基于扩散张量图像的配准算法研究摘要随着医学影像技术的发展,医学影像数据集越来越大,如何有效地将不同的影像数据进行配准成为了一个重要的问题。本文介绍了一种基于扩散张量图像的配准算法,该算法利用了扩散张量图像的局部结构信息和特征来进行匹配和配准,有效解决了传统方法中存在的配准效率低、精度低等问题。本文通过实验验证了该算法的效果,证明了其在医学影像配准中的应用价值。关键词:扩散张量图像、配准、特征匹配、医学影像、图像处理正文一、引言医学影像领域是目前最需要高精度、高效率的图像配准算法的领域之一。随着计算机图像处

涡轮叶片密集点云数据与CAD模型配准方法.pdf
涡轮叶片密集点云数据与CAD模型配准方法——黄胜利卜昆程云勇等涡轮叶片密集点云数据与CAD模型配准方法黄胜利卜昆程云勇周丽敏西北工业大学现代设计与集成制造技术教育部重点实验室,西安,710072摘要:针对密集点云数据与CAD模型的配准问题,提出了一种基于简化模型曲率计算的配准方法。该方法通过计算简化模型和CAD模型各点的曲率提取出两模型上某一对应的特征面,根据特征面求出三组对应点对并计算坐标变换矩阵;把得到的变换矩阵应用于简化前的原始点云模型实现模型的预配准;最后通过奇异值分解和最近点迭代相结合的算法实现