
基于双目RGB-D相机深度轮廓估计方法.pdf

光誉****君哥

1/9
2/9

3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于双目RGB-D相机深度轮廓估计方法.pdf
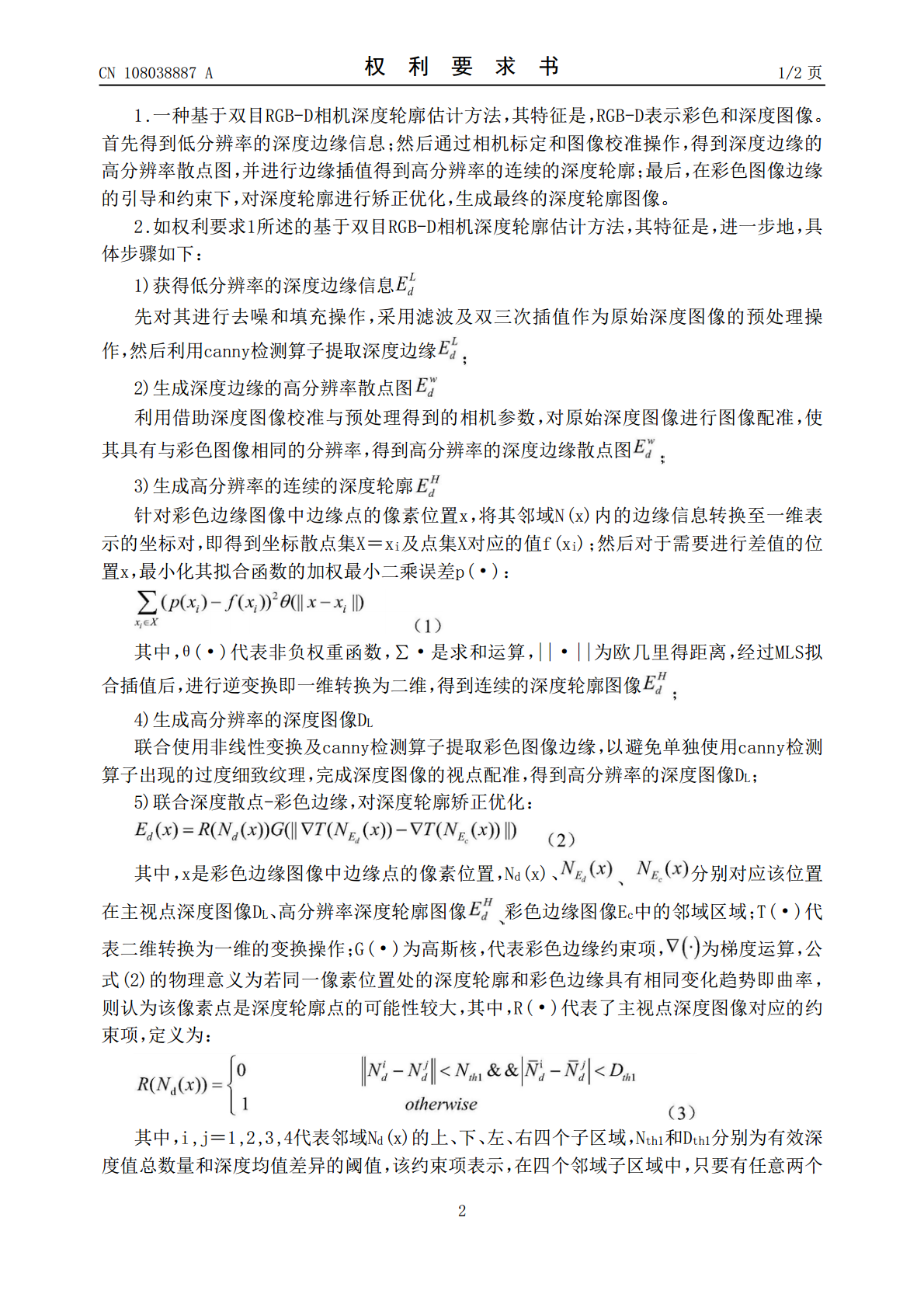
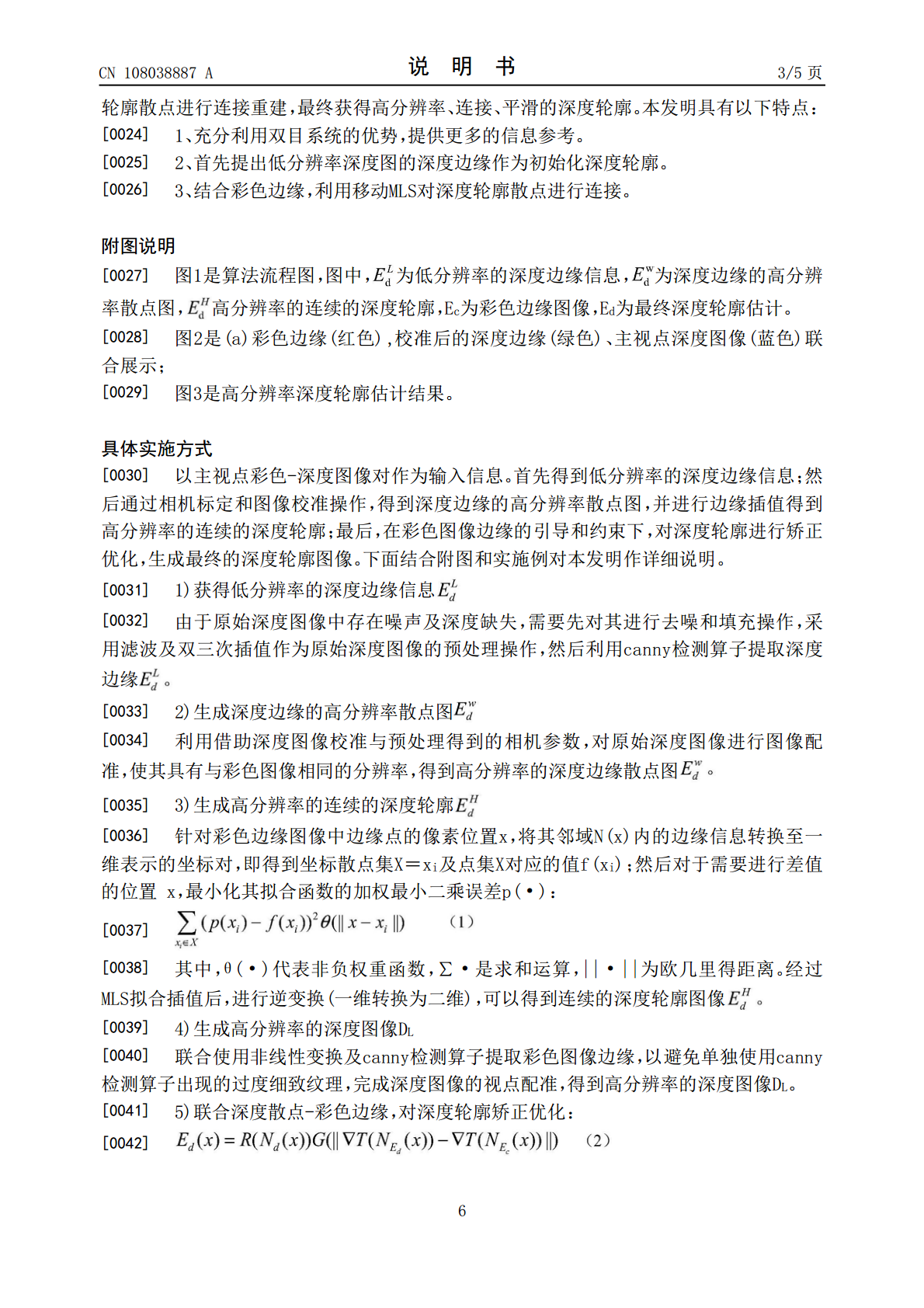
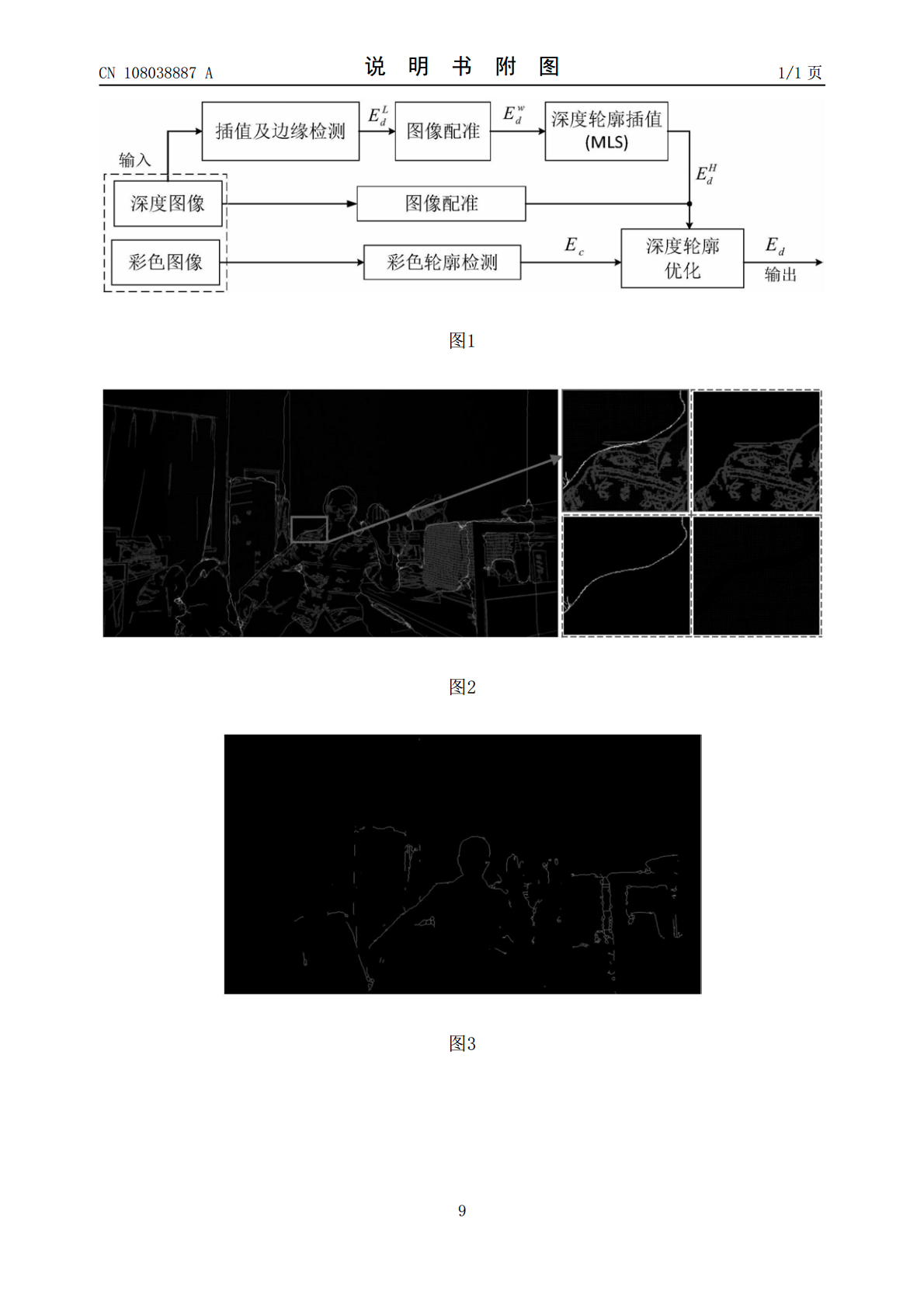
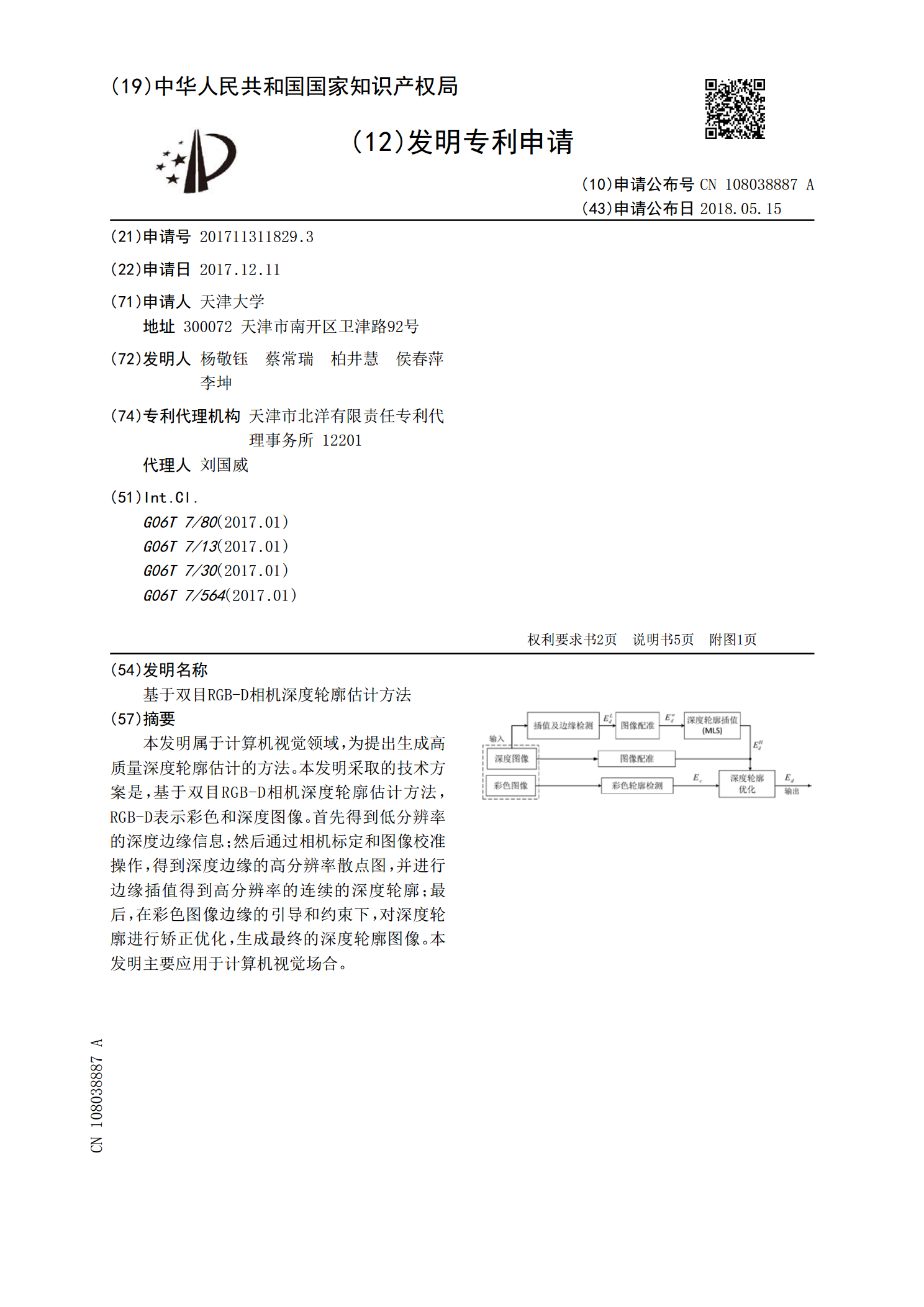
本发明属于计算机视觉领域,为提出生成高质量深度轮廓估计的方法。本发明采取的技术方案是,基于双目RGB‑D相机深度轮廓估计方法,RGB‑D表示彩色和深度图像。首先得到低分辨率的深度边缘信息;然后通过相机标定和图像校准操作,得到深度边缘的高分辨率散点图,并进行边缘插值得到高分辨率的连续的深度轮廓;最后,在彩色图像边缘的引导和约束下,对深度轮廓进行矫正优化,生成最终的深度轮廓图像。本发明主要应用于计算机视觉场合。
一种异步双目相机的深度估计方法及系统.pdf
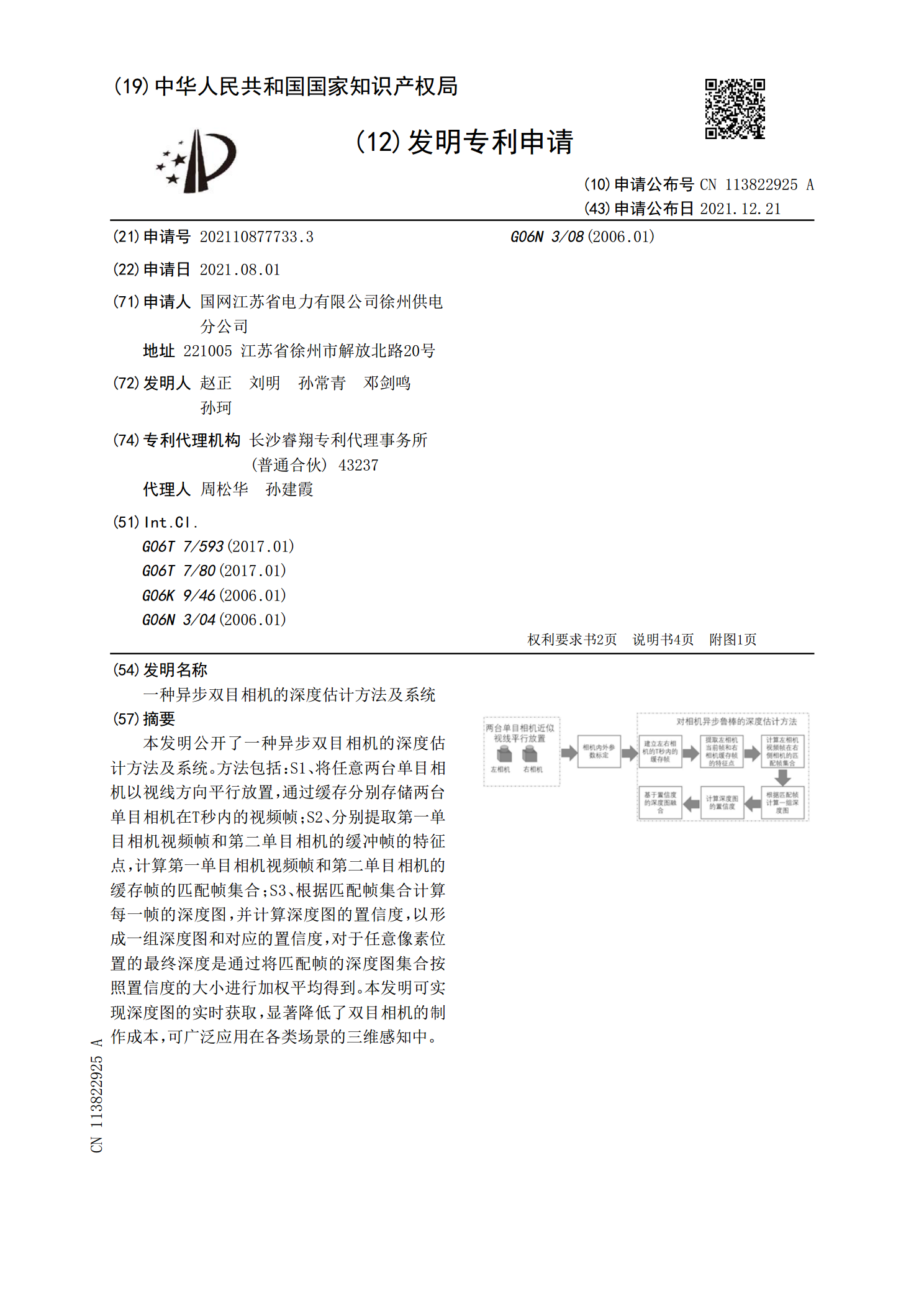
本发明公开了一种异步双目相机的深度估计方法及系统。方法包括:S1、将任意两台单目相机以视线方向平行放置,通过缓存分别存储两台单目相机在T秒内的视频帧;S2、分别提取第一单目相机视频帧和第二单目相机的缓冲帧的特征点,计算第一单目相机视频帧和第二单目相机的缓存帧的匹配帧集合;S3、根据匹配帧集合计算每一帧的深度图,并计算深度图的置信度,以形成一组深度图和对应的置信度,对于任意像素位置的最终深度是通过将匹配帧的深度图集合按照置信度的大小进行加权平均得到。本发明可实现深度图的实时获取,显著降低了双目相机的制作成本

基于深度学习的双目相机深度标定方法和系统.pdf
本发明公开了一种基于深度学习的双目相机深度标定方法和系统,所述方法包括:获取待标定双目相机的左目相机拍摄的左目靶标图,和所述待标定双目相机的右目相机拍摄的右目靶标图;将所述左目靶标图和右目靶标图输入预先训练的角点检测模型,得到左目靶标图的第一角点检测结果、右目靶标图的第二角点检测结果,以及所述第一角点检测结果和所述第二角点检测结果之间的角点匹配结果;基于所述第一角点检测结果、所述第二角点检测结果和所述角点匹配结果,生成所述待标定双目相机的深度标定结果。在自动驾驶或辅助驾驶场景中,提高角点检测的准确性,从而
融合激光雷达和双目相机的深度估计方法、装置及设备.pdf
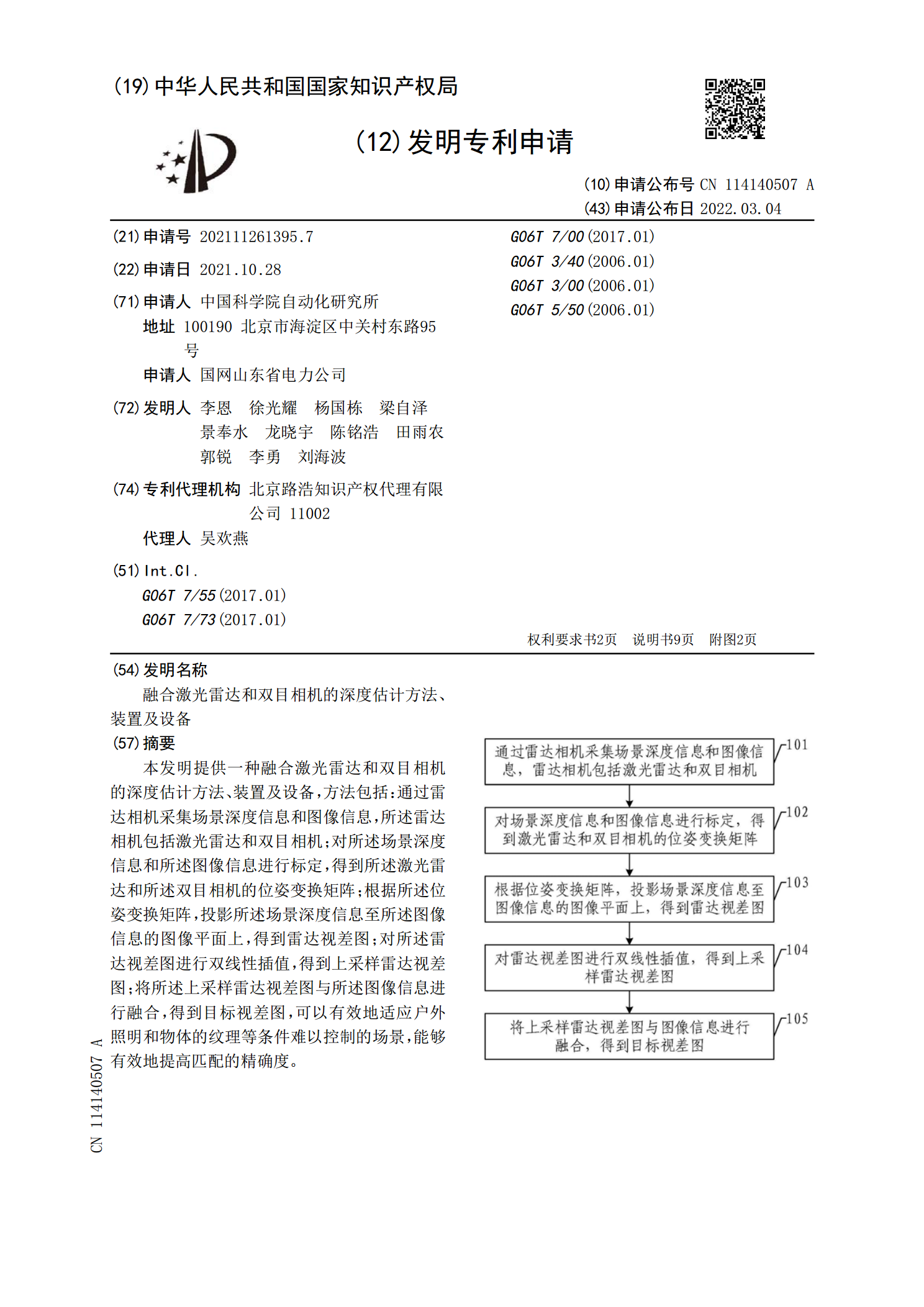
本发明提供一种融合激光雷达和双目相机的深度估计方法、装置及设备,方法包括:通过雷达相机采集场景深度信息和图像信息,所述雷达相机包括激光雷达和双目相机;对所述场景深度信息和所述图像信息进行标定,得到所述激光雷达和所述双目相机的位姿变换矩阵;根据所述位姿变换矩阵,投影所述场景深度信息至所述图像信息的图像平面上,得到雷达视差图;对所述雷达视差图进行双线性插值,得到上采样雷达视差图;将所述上采样雷达视差图与所述图像信息进行融合,得到目标视差图,可以有效地适应户外照明和物体的纹理等条件难以控制的场景,能够有效地提高

基于RGBD相机的人的检测与跟踪.docx
基于RGBD相机的人的检测与跟踪摘要:RGBD相机作为一种新型的传感器,其在人的检测与跟踪方面具备很大的优势。本文从基本原理入手,介绍了RGBD相机的工作原理和相关技术,然后详细阐述了基于RGBD相机的人的检测和跟踪算法,从特征提取、分类器优化和运动估计等方面进行了全面的探讨。最后,本文提出了一些值得深入研究的方向,为后续研究提供了一定的借鉴和参考。关键词:RGBD相机;人的检测与跟踪;特征提取;分类器优化;运动估计一、引言人的检测与跟踪技术是计算机视觉领域中的一个重要研究方向,其在智能监控、自动驾驶、增