
一种6m自行走剪叉式高空作业平台设计研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种6m自行走剪叉式高空作业平台设计研究.docx
一种6m自行走剪叉式高空作业平台设计研究一种6m自行走剪叉式高空作业平台设计研究摘要:本文基于对剪叉式高空作业平台的需求分析和国内外相关研究的综合分析,提出了一种6m自行走剪叉式高空作业平台设计方案。该方案采用了先进的传感器和控制系统,能够实现平稳的升降运动和灵活的移动。通过实验验证,该设计方案能够满足高空作业的安全性和效率要求。关键词:剪叉式高空作业平台、自行走、设计方案、安全性、效率引言:随着城市的不断发展和建筑物的不断增多,对高空作业平台的需求越来越大。剪叉式高空作业平台作为一种常用的设备,在建筑、

一种带有抽屉结构的自行走剪叉式高空作业平台.pdf
本发明公开了一种带有抽屉结构的自行走剪叉式高空作业平台,包括:底盘、行走机构、剪叉式升降机构以及工作平台,底盘包括底盘架和位于底盘架下方与底盘架滑动连接的抽屉,抽屉包括前面板、后面板、左侧面板、右侧面板以及底面板,抽屉内设有动力单元和拖链,左侧面板的外侧和右侧面板的外侧均设有沿前后方向长度延伸的滑轨,拖链沿前后方向延伸设置,其一端通过拖链连接板与右侧面板连接,拖链内置有电缆和油管,动力单元包括液压动力单元和电动力单元;行走机构包括设于底盘下方的驱动桥和转向桥,驱动桥设有驱动电机,转向桥设有转向油缸,剪叉式
一种剪叉式高空作业平台.pdf
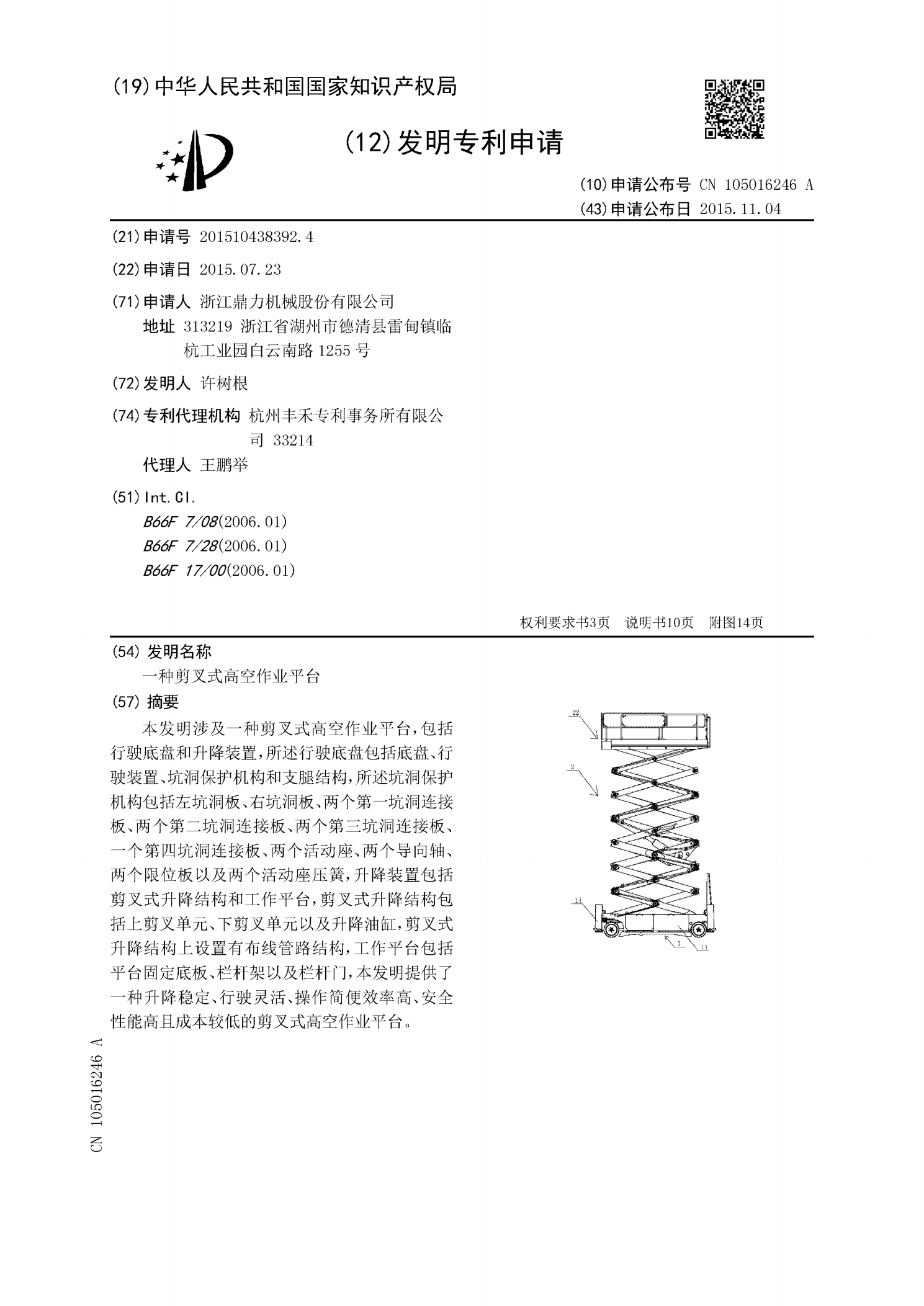
本发明涉及一种剪叉式高空作业平台,包括行驶底盘和升降装置,所述行驶底盘包括底盘、行驶装置、坑洞保护机构和支腿结构,所述坑洞保护机构包括左坑洞板、右坑洞板、两个第一坑洞连接板、两个第二坑洞连接板、两个第三坑洞连接板、一个第四坑洞连接板、两个活动座、两个导向轴、两个限位板以及两个活动座压簧,升降装置包括剪叉式升降结构和工作平台,剪叉式升降结构包括上剪叉单元、下剪叉单元以及升降油缸,剪叉式升降结构上设置有布线管路结构,工作平台包括平台固定底板、栏杆架以及栏杆门,本发明提供了一种升降稳定、行驶灵活、操作简便效率高

一种剪叉式高空作业平台.pdf
本发明公开了一种剪叉式高空作业平台,第一剪叉条一端开有方形槽口,方形槽口内安装有连接块,连接块表面开有内螺纹孔;丝杠与连接块啮合,丝杠一端固定有蜗杆,蜗杆安装于方形盒内;两个方形盒之间通过第一伸缩管和第二伸缩管连接;控制杆穿过第一伸缩管和第二伸缩管。本发明公开了一种剪叉架升高控制装置,通过转动控制杆实现剪叉架的升降,剪叉架固定于底座平台上,下端通过底座限位进行横向运动,控制杆通过电机或液压气缸驱动,装置结构简单,使用方便,易于拆卸清理,为高空作业平台提供了一种更为行之有效的升降方式。

一种自行走剪叉式升降平台.pdf
本发明涉及一种自行走剪叉式升降平台,包括车辆底盘、剪叉式升降机构和工作平台,所述车辆底盘设有电动驱动轮和随动轮,所述电动驱动轮安装在后轴的两端,所述随动轮安装在前轴的两端,所述前轴或前后两轴上安装有车辆转向系统;所述车辆转向系统包括电动推杆和连杆机构。本发明以电动驱动轮为行驶动力装置,使用电动推杆驱动连杆机构实现转向,并配合电动升降系统进行使用,不用安装液压系统,只需连接电路系统控制供电即可,极大的简化了产品结构,降低了车辆自重和成本,同时也方便保养和检修;由于实现了全电动控制,车辆的运行和检修可以通过远