
车辆自适应巡航控制策略及算法对比分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

车辆自适应巡航控制策略及算法对比分析.docx
车辆自适应巡航控制策略及算法对比分析车辆自适应巡航控制策略及算法对比分析摘要:随着科技的不断进步,智能交通系统(ITS)得到了广泛的发展与应用。其中,车辆自适应巡航控制(ACC)作为智能交通系统的重要组成部分之一,对于提高行车安全性和道路交通效率起到了重要作用。本文旨在通过对车辆自适应巡航控制策略及算法的对比分析,探讨其优缺点,为智能交通系统的发展提供参考。1.引言车辆自适应巡航控制是一种利用车辆间通信和传感技术实现的智能交通系统,通过感知前方车辆的动态信息与运动轨迹,自动调整车辆的速度和距离,从而实现车
车辆自适应巡航控制策略研究与仿真.pptx
汇报人:/目录0102车辆自适应巡航控制概述控制策略设计控制算法实现算法性能评估03仿真平台选择仿真模型建立仿真参数设置仿真结果验证04不同控制策略下的仿真结果对比控制算法性能优化方向仿真结果在实际中的应用前景未来研究方向展望汇报人:

车辆自适应巡航控制策略研究与仿真.docx
车辆自适应巡航控制策略研究与仿真车辆自适应巡航控制策略研究与仿真摘要:随着汽车技术的不断发展,车辆自适应巡航控制(AdaptiveCruiseControl,ACC)在提高车辆驾驶安全性和舒适性方面起着重要作用。本文通过对车辆自适应巡航控制策略的研究与仿真,分析了不同策略对车辆行驶过程中的控制性能和经济性的影响。仿真结果表明,车辆自适应巡航控制能够有效地提高行车的安全性和经济性,为现代车辆控制系统的发展提供了重要参考。关键词:车辆自适应巡航控制;策略研究;仿真分析;控制性能;经济性1.引言车辆自适应巡航控
一种车辆自适应巡航算法.pdf
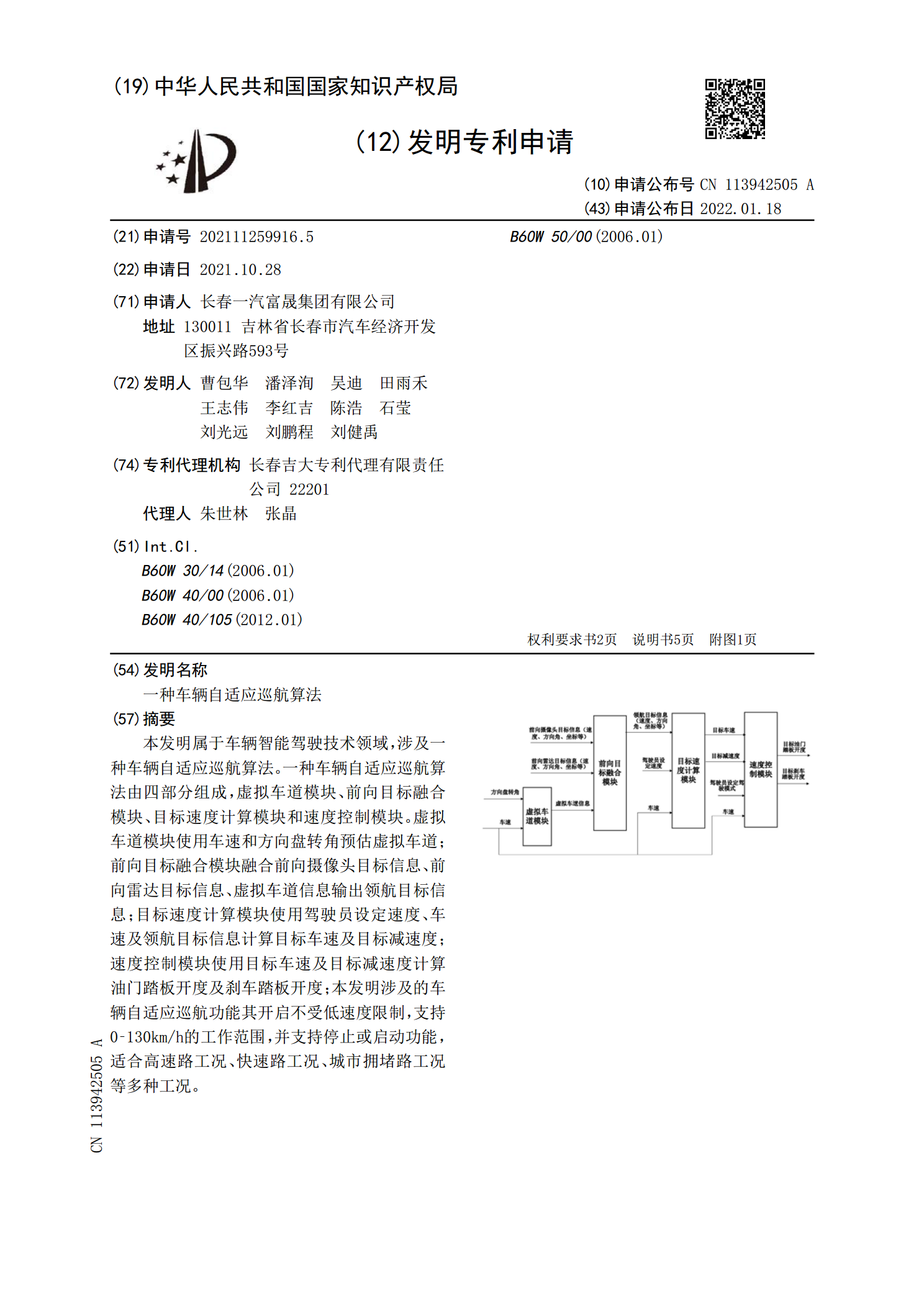
本发明属于车辆智能驾驶技术领域,涉及一种车辆自适应巡航算法。一种车辆自适应巡航算法由四部分组成,虚拟车道模块、前向目标融合模块、目标速度计算模块和速度控制模块。虚拟车道模块使用车速和方向盘转角预估虚拟车道;前向目标融合模块融合前向摄像头目标信息、前向雷达目标信息、虚拟车道信息输出领航目标信息;目标速度计算模块使用驾驶员设定速度、车速及领航目标信息计算目标车速及目标减速度;速度控制模块使用目标车速及目标减速度计算油门踏板开度及刹车踏板开度;本发明涉及的车辆自适应巡航功能其开启不受低速度限制,支持0‑130k

车辆自适应巡航控制系统的设计与仿真分析.docx
车辆自适应巡航控制系统的设计与仿真分析车辆自适应巡航控制系统的设计与仿真分析摘要:随着科技的不断发展,车辆自适应巡航控制系统逐渐成为了现代车辆的重要配备之一。本论文首先介绍了自适应巡航控制系统的原理和功能,然后详细设计并模拟了一个车辆自适应巡航控制系统,并对该系统进行了性能分析和优化。最后,通过仿真实验验证了该系统的稳定性和效果。关键词:车辆自适应巡航控制系统,设计,仿真分析,性能优化1.引言车辆自适应巡航控制系统是一种基于车辆感知和控制技术的智能驾驶辅助系统,可以实现自动保持车辆在预设速度下匀速行驶,并