
蜂鸟扑翼飞行器传动机构的实现与分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

蜂鸟扑翼飞行器传动机构的实现与分析.docx
蜂鸟扑翼飞行器传动机构的实现与分析蜂鸟扑翼飞行器传动机构的实现与分析摘要:传动机构是蜂鸟扑翼飞行器实现飞行动作的关键组成部分。本文通过研究蜂鸟的生物学特点,分析了蜂鸟扑翼飞行器传动机构的设计原则和实现方法。基于这些原则和方法,我们设计了一种传动机构,并对其进行了分析和评估。结果表明,该传动机构能够有效地模拟蜂鸟的扑翼运动,实现高效、灵活的飞行。关键词:蜂鸟;扑翼飞行器;传动机构;设计;分析一、引言蜂鸟扑翼飞行器是一种仿生机器人,通过模拟蜂鸟的扑翼运动实现飞行。扑翼飞行器的传动机构起着关键作用,直接影响机器
仿生蜂鸟扑翼飞行器.pdf
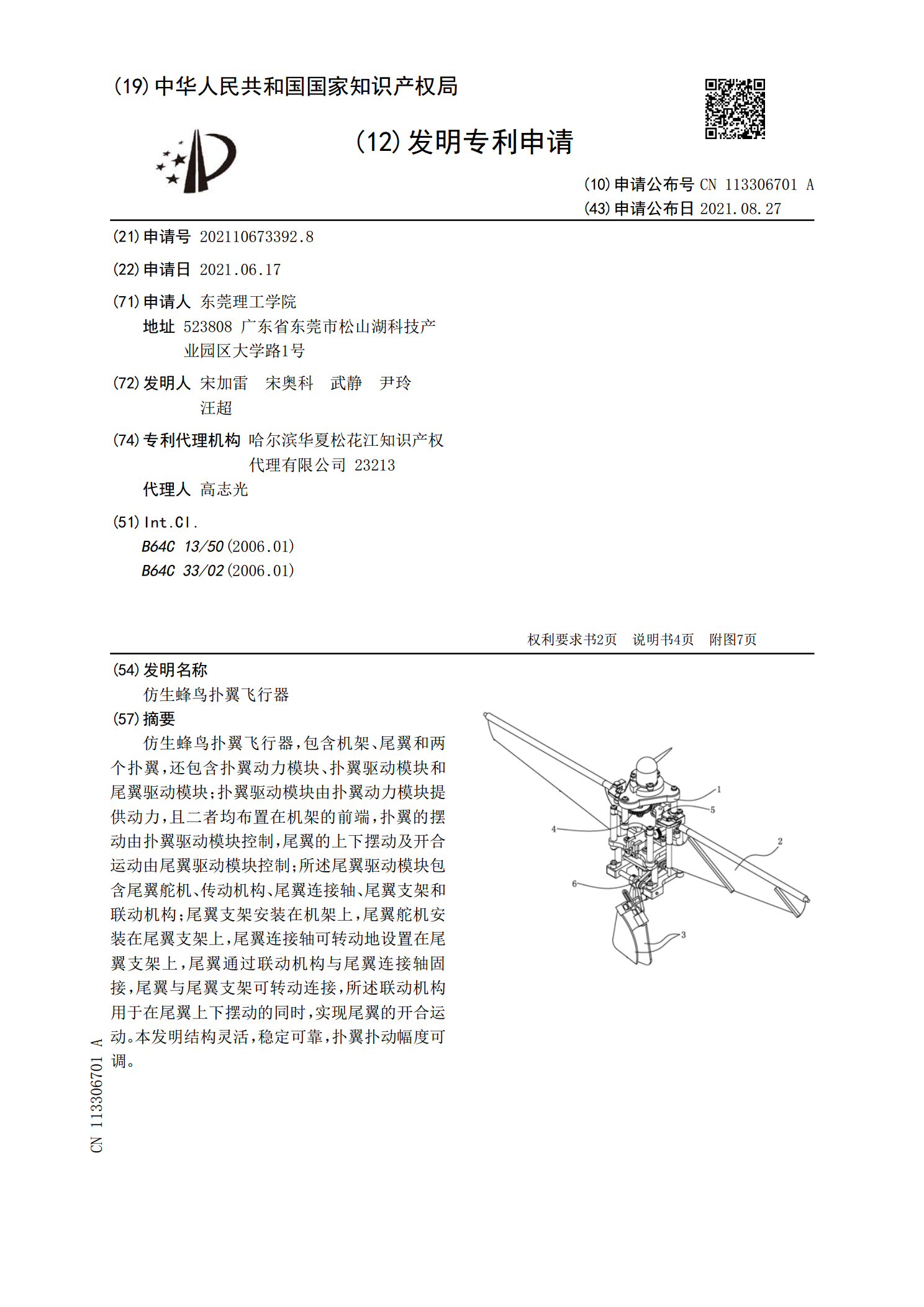
仿生蜂鸟扑翼飞行器,包含机架、尾翼和两个扑翼,还包含扑翼动力模块、扑翼驱动模块和尾翼驱动模块;扑翼驱动模块由扑翼动力模块提供动力,且二者均布置在机架的前端,扑翼的摆动由扑翼驱动模块控制,尾翼的上下摆动及开合运动由尾翼驱动模块控制;所述尾翼驱动模块包含尾翼舵机、传动机构、尾翼连接轴、尾翼支架和联动机构;尾翼支架安装在机架上,尾翼舵机安装在尾翼支架上,尾翼连接轴可转动地设置在尾翼支架上,尾翼通过联动机构与尾翼连接轴固接,尾翼与尾翼支架可转动连接,所述联动机构用于在尾翼上下摆动的同时,实现尾翼的开合运动。本发明

仿蜂鸟扑翼微飞行器.pdf
本发明公开一种仿生微飞行器领域的仿蜂鸟扑翼微飞行器,包括:机架、减速齿轮组、电机、传动机构、平行轴结构以及一对翅膀。其中机架上面直接装配减速齿轮组、电机和平行轴结构;传动机构装配在减速齿轮组和平行轴结构之间,用来将减速齿轮组输出的连续转动转化成平行轴的往复转动;一对翅膀装配在平行轴结构上面,从而实现自身的拍打运动,并与其他部分形成一个完整的扑翼微飞行器。本发明中两翅膀的拍打运动完全对称,很大程度上减小了振动对飞行器性能的影响,降低了飞行器的控制难度;同时,本发明结构简洁合理,便于加工,更便于进行改进以完成

扑翼飞行器传动机构的研究及对比分析.pptx
,CONTENTS01.02.传动机构定义扑翼飞行器特点传动机构在扑翼飞行器中的作用03.国内外研究现状研究目的和意义研究方法和技术路线04.齿轮传动机构链条传动机构曲轴连杆传动机构凸轮传动机构不同传动机构的优缺点比较05.设计原则和要求参数化设计和优化方法有限元分析和动力学仿真优化实例和效果分析06.实验设备和方法实验结果和分析结果与理论分析的对比验证实验结论与讨论07.应用前景和潜在领域技术发展趋势和展望需要进一步研究和解决的问题感谢您的观看!
基于翅翼变形的仿蜂鸟扑翼无人飞行器的控制机构.pdf
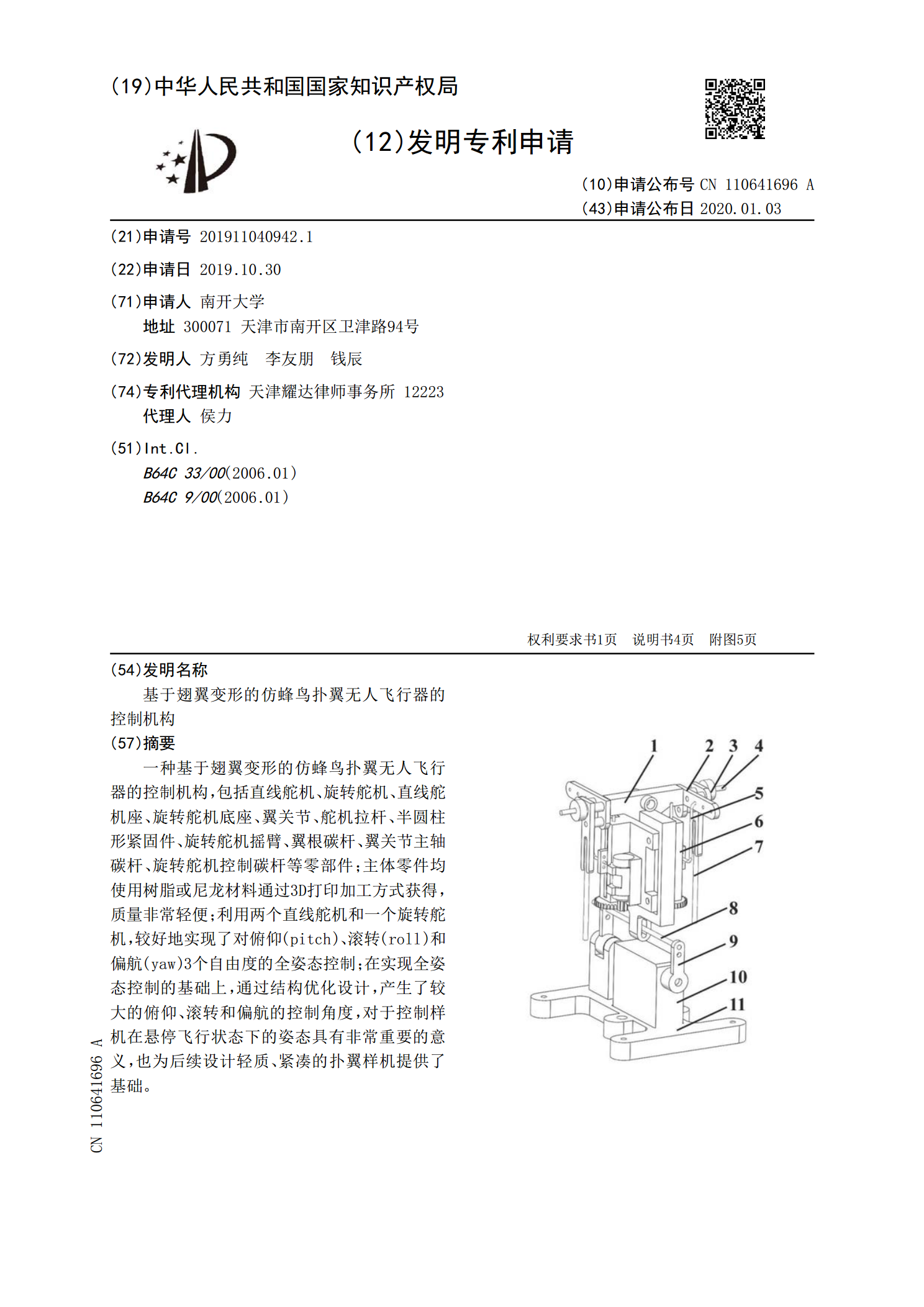
一种基于翅翼变形的仿蜂鸟扑翼无人飞行器的控制机构,包括直线舵机、旋转舵机、直线舵机座、旋转舵机底座、翼关节、舵机拉杆、半圆柱形紧固件、旋转舵机摇臂、翼根碳杆、翼关节主轴碳杆、旋转舵机控制碳杆等零部件;主体零件均使用树脂或尼龙材料通过3D打印加工方式获得,质量非常轻便;利用两个直线舵机和一个旋转舵机,较好地实现了对俯仰(pitch)、滚转(roll)和偏航(yaw)3个自由度的全姿态控制;在实现全姿态控制的基础上,通过结构优化设计,产生了较大的俯仰、滚转和偏航的控制角度,对于控制样机在悬停飞行状态下的姿态具