
无人海上航行器磁探搜潜方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人海上航行器磁探搜潜方法研究.docx
无人海上航行器磁探搜潜方法研究标题:无人海上航行器磁探搜潜方法研究摘要:随着海洋资源的日益开发和利用,对无人海上航行器的需求越来越高。而潜在的潜艇威胁以及潜水遗骸等问题也对于海上安全提出了挑战。针对这些问题,磁探搜潜技术应运而生,本文就无人海上航行器磁探搜潜方法进行研究和探讨,为相关领域的发展提供一定的参考。引言:潜艇和潜水遗骸等隐患对于海上安全构成着潜在的威胁,为了提高无人海上航行器对于这些问题的探测能力,磁探搜潜技术成为了研究的热点。本文旨在研究无人海上航行器磁探搜潜方法,包括磁场监测、目标识别和定位

声纳浮标与磁探联合搜潜仿真研究.docx
声纳浮标与磁探联合搜潜仿真研究声纳浮标与磁探联合搜潜仿真研究摘要:在海上进行搜潜任务,通常需要采用各种探测技术以获得目标的位置信息。声纳浮标和磁探是最常用的搜潜技术。本文通过仿真研究声纳浮标与磁探联合搜潜的效果,探究两种技术的优势结合对搜潜任务的实际应用的帮助。关键词:声纳浮标、磁探、联合搜潜、仿真研究引言:随着科学技术的不断进步,搜潜任务在国防安全中的作用越来越重要。搜潜任务中涉及到的技术非常多,其中声纳浮标和磁探是最常用的探测技术。声纳浮标主要根据水中的声波反射和传播规律来确定目标位置,磁探主要是通过
一种水下无人航行器搜探性能评价试验方法.pdf
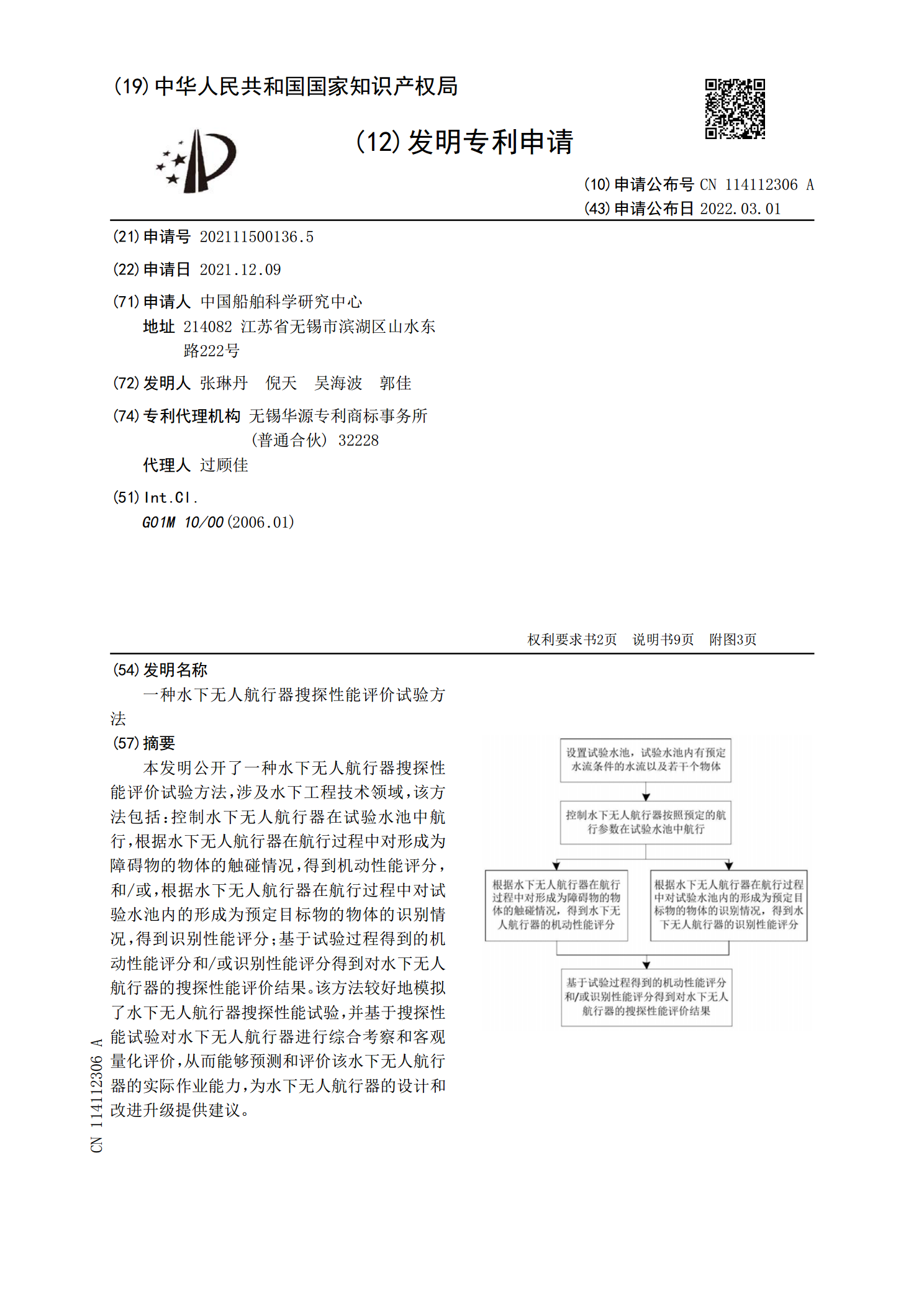
本发明公开了一种水下无人航行器搜探性能评价试验方法,涉及水下工程技术领域,该方法包括:控制水下无人航行器在试验水池中航行,根据水下无人航行器在航行过程中对形成为障碍物的物体的触碰情况,得到机动性能评分,和/或,根据水下无人航行器在航行过程中对试验水池内的形成为预定目标物的物体的识别情况,得到识别性能评分;基于试验过程得到的机动性能评分和/或识别性能评分得到对水下无人航行器的搜探性能评价结果。该方法较好地模拟了水下无人航行器搜探性能试验,并基于搜探性能试验对水下无人航行器进行综合考察和客观量化评价,从而能够

无人水下航行器SINSDVL组合导航方法研究.docx
无人水下航行器SINSDVL组合导航方法研究摘要:随着水下航行器广泛应用,对于其导航精度的要求越来越高,而传统的GNSS导航在水下的精度较差,因此需要寻求新的导航解决方式。本文研究了一种基于SINSDVL组合的水下航行器导航方法,利用声纳进行距离和速度的测量,并通过惯性导航仪进行位置和姿态的估计,最后通过SINSDVL组合获得更为精准的导航结果。实验结果表明,该方法不仅可以有效提高水下航行器的导航精度,而且具有较强的适应性和应用价值。关键词:水下航行器;SINSDVL组合导航;声纳测距;惯性导航;导航精度

基于增强学习的水下无人航行器控制方法研究.docx
基于增强学习的水下无人航行器控制方法研究基于增强学习的水下无人航行器控制方法研究摘要:随着科技的发展,水下无人航行器在水下勘查、海底资源开发和海洋生态环境监测方面发挥了重要的作用。然而,传统的水下航行器控制方法存在着许多问题,如在复杂的环境中难以实现精确的控制和适应性的调整。因此,基于增强学习的水下无人航行器控制方法应运而生。本文将重点研究基于增强学习的水下无人航行器控制方法,并分析其在实际应用中的潜力和挑战。关键词:水下无人航行器、增强学习、控制方法、潜力、挑战1.引言水下无人航行器作为一种重要的海洋探