
扑翼飞行器半自主导航系统的设计与实现.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

扑翼飞行器半自主导航系统的设计与实现.docx
扑翼飞行器半自主导航系统的设计与实现摘要扑翼飞行器是一种模仿鸟类飞行的机器人,具有较高的灵活性和适应性。为了实现扑翼飞行器的半自主导航,本论文设计了一个由多传感器和控制算法组成的导航系统。该系统可以通过感知环境信息,实时调整飞行器的姿态和轨迹,以实现自主控制和导航。关键词:扑翼飞行器;半自主导航;多传感器;控制算法;姿态调整;轨迹控制1.引言扑翼飞行器作为一种高度灵活的机器人,具有模仿鸟类飞行的特点。与传统的固定翼飞行器相比,扑翼飞行器能够在狭小空间中飞行,具有更好的机动性和适应性。为了实现扑翼飞行器的半
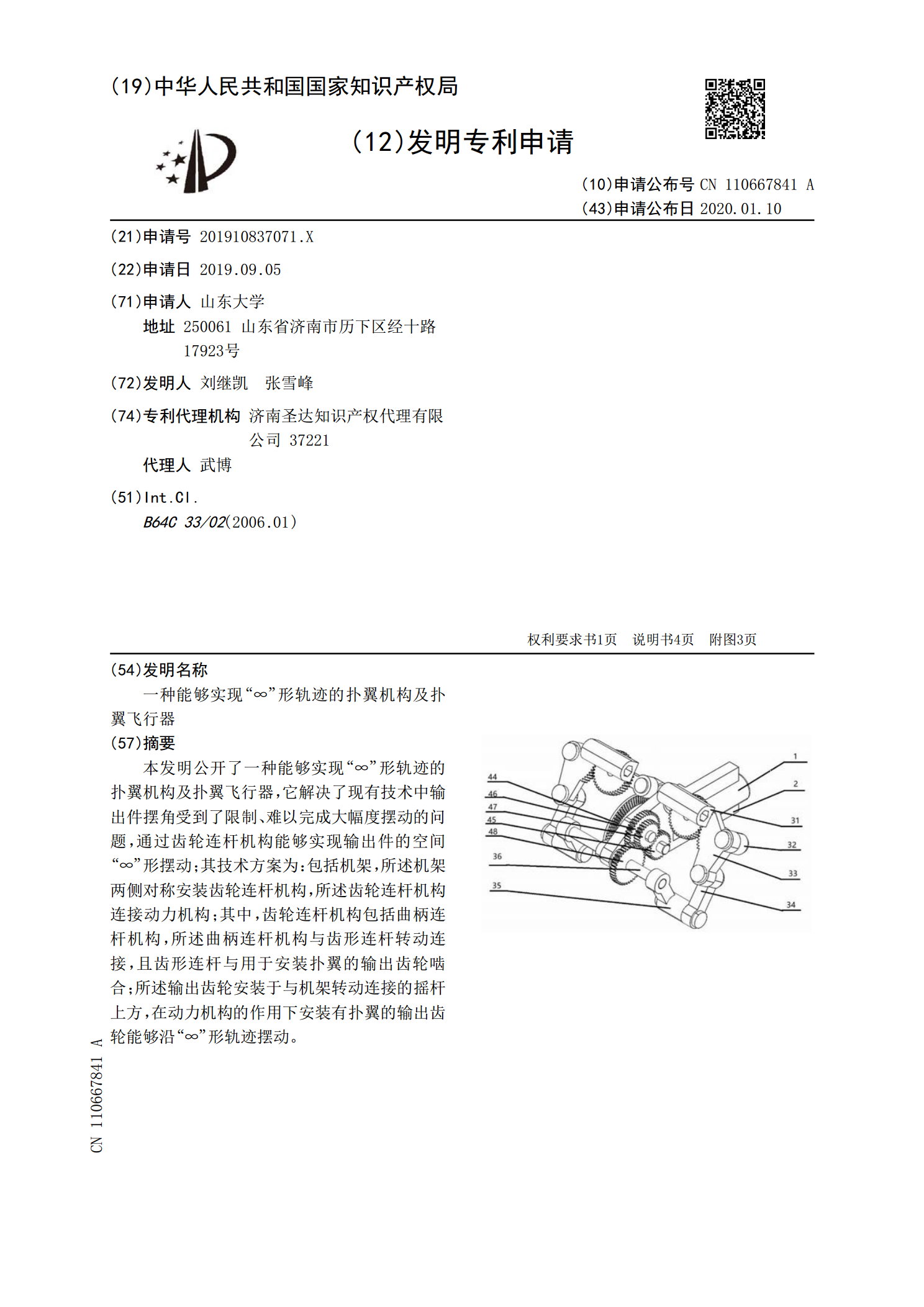
一种能够实现“∞”形轨迹的扑翼机构及扑翼飞行器.pdf
本发明公开了一种能够实现“∞”形轨迹的扑翼机构及扑翼飞行器,它解决了现有技术中输出件摆角受到了限制、难以完成大幅度摆动的问题,通过齿轮连杆机构能够实现输出件的空间“∞”形摆动;其技术方案为:包括机架,所述机架两侧对称安装齿轮连杆机构,所述齿轮连杆机构连接动力机构;其中,齿轮连杆机构包括曲柄连杆机构,所述曲柄连杆机构与齿形连杆转动连接,且齿形连杆与用于安装扑翼的输出齿轮啮合;所述输出齿轮安装于与机架转动连接的摇杆上方,在动力机构的作用下安装有扑翼的输出齿轮能够沿“∞”形轨迹摆动。

基于变形翼实现扑旋翼和扑翼飞行模式转换的仿生飞行器.pdf
本发明公开了一种基于变形翼实现扑旋翼和扑翼飞行模式转换的仿生飞行器,属于仿生飞行器设计技术领域。当其进行垂直起降与悬停时,为扑旋翼飞行模式,结构特征为两侧扑翼以旋翼轴对称方式安装,即两侧翼型呈反对称;当进行前飞或滑翔时,为扑翼或固定翼飞行模式,结构特征为两侧扑翼以固定翼对称方式安装,即两侧翼型呈对称状。同时,采用一种弹性弓梁、弦、多杆机构组成的变形翼翼肋结构设计,在进行变形翼型状变化时,通过转动安装在翼根部的拉杆和连接各翼肋的拉索,拉动多杆机构迫使相连接的弓梁产生所需弹性变形,即保持翼型整体结构不变,但变
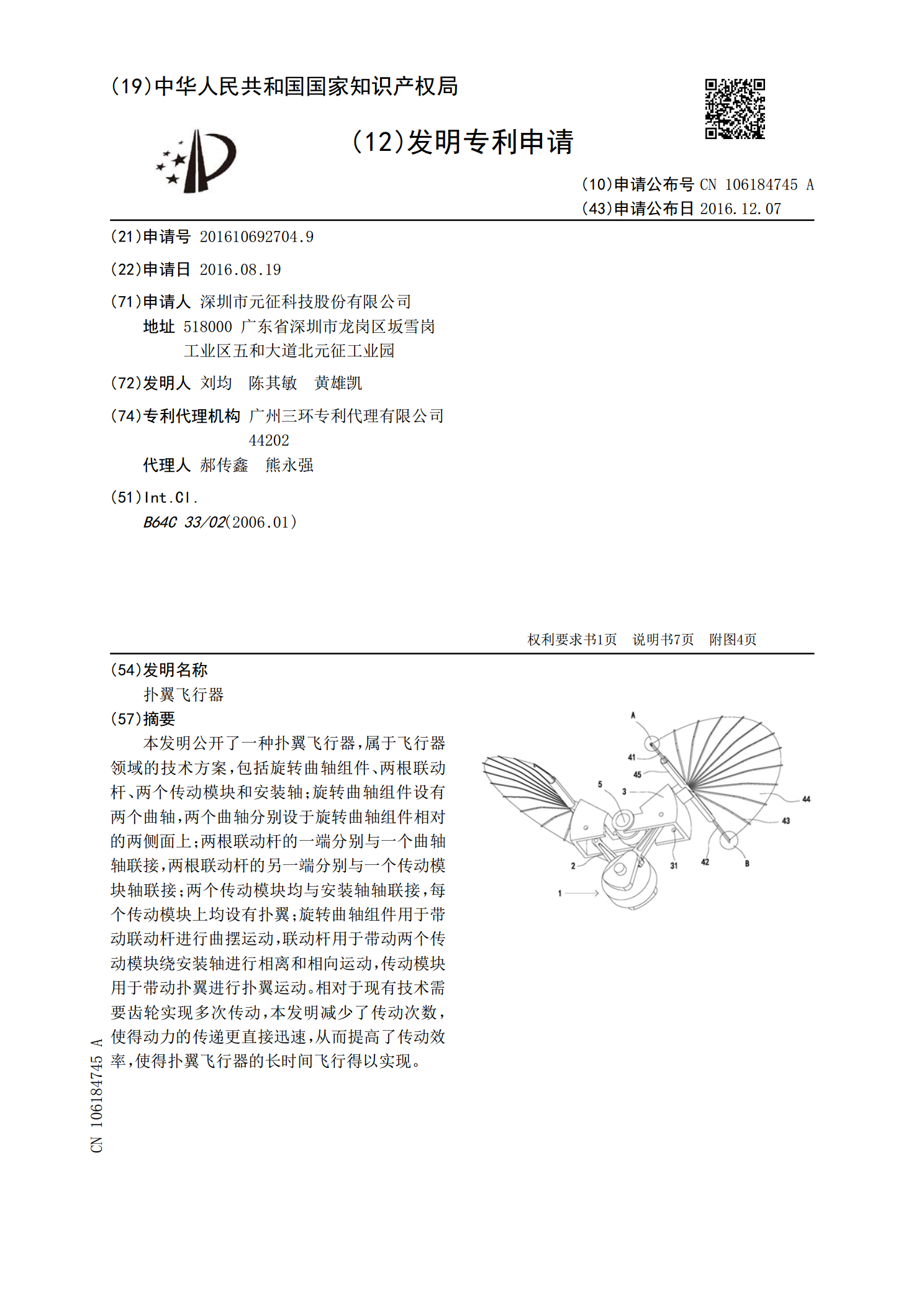
扑翼飞行器.pdf
本发明公开了一种扑翼飞行器,属于飞行器领域的技术方案,包括旋转曲轴组件、两根联动杆、两个传动模块和安装轴;旋转曲轴组件设有两个曲轴,两个曲轴分别设于旋转曲轴组件相对的两侧面上;两根联动杆的一端分别与一个曲轴轴联接,两根联动杆的另一端分别与一个传动模块轴联接;两个传动模块均与安装轴轴联接,每个传动模块上均设有扑翼;旋转曲轴组件用于带动联动杆进行曲摆运动,联动杆用于带动两个传动模块绕安装轴进行相离和相向运动,传动模块用于带动扑翼进行扑翼运动。相对于现有技术需要齿轮实现多次传动,本发明减少了传动次数,使得动力的

主动式扑翼飞行器扑翼控制的研究.docx
主动式扑翼飞行器扑翼控制的研究主动式扑翼飞行器扑翼控制的研究摘要:主动式扑翼飞行器是一种模仿鸟类翅膀扑打的飞行器,其扑打运动控制成为了科研领域的热点问题。本文通过对主动式扑翼飞行器的基本原理介绍和扑翼控制方法的研究综述,旨在为该领域的研究者提供一定的参考。关键词:主动式扑翼飞行器,扑翼控制,研究综述一、引言随着无人机技术的发展,主动式扑翼飞行器逐渐受到研究者的关注。与传统的固定翼飞行器相比,主动式扑翼飞行器在机动性和机器人学方面具有显著优势。然而,其扑翼控制仍然是一个待解决的问题。本文将重点介绍扑翼控制的